P-3 « Dumbo »
Description de l'unité de radar, les caractéristiques techniques tactique
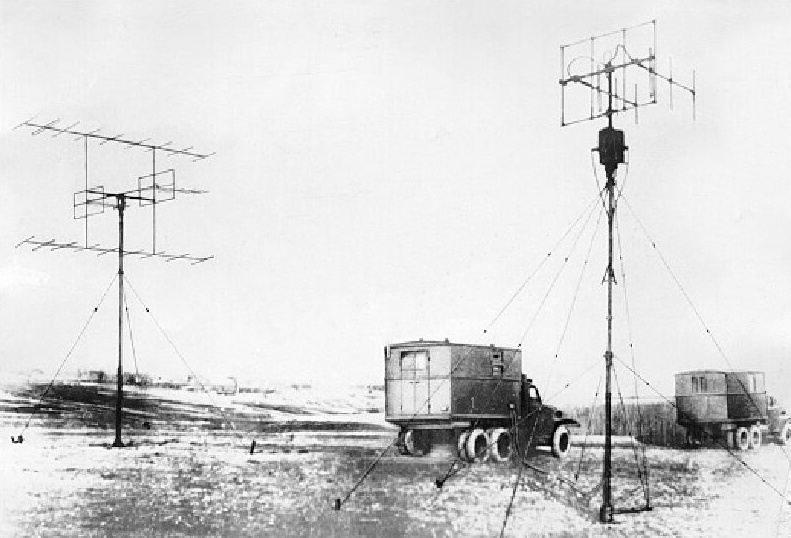
Figure 1 : Une version mobile P3M (antenne à gauche), source: Musée Nitel

| Données techniques | |
|---|---|
| Fréquence : | VHF–Band |
| Période de répétition des impulsions (PRI) : | |
| Fréquence de répétition des impulsions (FRI) : |
|
| Largeur d’impulsion (τ) : | |
| Temps de réception : | |
| Temps mort : | |
| Puissance de pointe : | 55 kW |
| Puissance moyenne : | |
| Portée maximale : | 120 km |
| Résolution versus portée : | 2,5 km |
| Précision : | |
| Largeur du faisceau : | 24° |
| Niveaux d’affichage : | |
| Taux de rotation de l’antenne : | |
| MTBCF : | |
| MTTR : | |
P-3 « Dumbo »
Le premier radar tridimensionnel soviétique, le Pegmantit 3 ou P3, a été construit durant le Seconde Guerre mondiale. Deux versions furent produites : le P-3M mobile et le P-3A statique. La version mobile était démontable et transportable dans des conteneurs chargés sur deux camions, le transmetteur et le récepteur étant dans des conteneurs différents.
Une antenne émettait en azimut et l’affichage des données se faisait sur un écran de type A. La précision angulaire et le gain de l’antenne Yagi-Uda simple était très faible. La rotation devait être lente et faite manuellement pour trouver les échos les plus intenses comme avec un radiogoniomètre.
L’angle de site (ou d’élévation) était obtenu par l’antenne d’un radar russe plus ancien de bande VHF (ex. série « Knife Rest »). Ce dernier émettait une onde entretenue par une antenne formée de deux antennes, ou groupes d’antennes, Yagi-Uda superposées vers la cible trouvée par le P3 en azimut et la différence de phase entre les deux échos retournés donnait l’angle. Pour mesurer cette différence, les signaux retournés étaient envoyés dans une bague collectrice pour chacune des antennes ce qui donnait une différence de potentiel entre les deux bagues. Lorsque la différence était nulle, cela indiquait que l’angle d’élévation des antennes était celle de la cible. Grâce à un diagramme, l’opérateur pouvait convertir cet angle et la donnée de distance venant de l’affichage A en une hauteur pour la cible.
Source&8202: G. Nitschke, K.-H. Lau, Von der visuellen Luftraumbeobachtung zur elektronischen Luftraumaufklärung
dans Militärwesen 7/72 - Ausgabe B (Luftstreitkräfte) Militärverlag der DDR
Figure 2 : Une représentation graphique de la version fixe