RAT-31 SL
Description de l'unité de radar, les caractéristiques techniques tactique
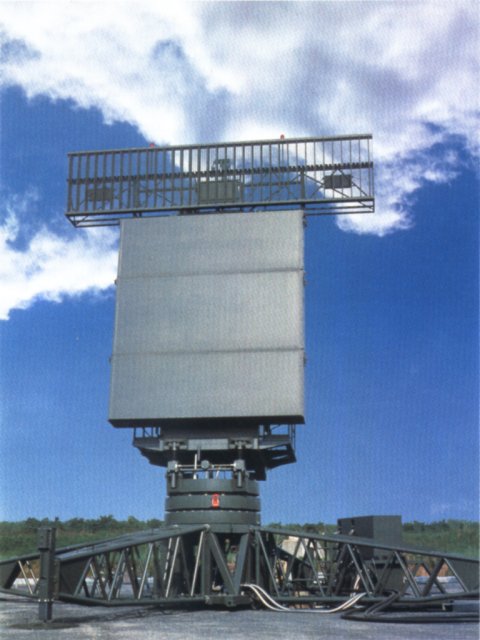
Figure 1 : Radar d’alerte lointaine en trois dimensions RAT-31SL/3D
| Données techniques | |
|---|---|
| Fréquence : | Bande S |
| Période de répétition des impulsions (PRI) : |
|
| Fréquence de répétition des impulsions (FRI) : |
(décalés) |
| Largeur d’impulsion (τ) : | |
| Temps de réception : | |
| Temps mort : | |
| Puissance de pointe : | 155 kW |
| Puissance moyenne : | |
| Portée maximale : | 450 km |
| Résolution versus portée : | |
| Précision : | |
| Largeur du faisceau : | 1,5° (1,3°) |
| Coups au but par balayage : | 1 à 3 |
| Taux de rotation de l’antenne : | 6 min⁻¹. |
| MTBCF : | |
| MTTR : | |
RAT-31 SL
Lorsqu’une cible est détectée, les chasseurs de la défense aérienne doivent aller l’identifier au plus tôt et s’opposer à toute incursion de l’espace aérien national. La compagnie Alenia a développé le RAT-31 SL, un radar moderne à antenne réseau à commande de phase de bande S, pour la surveillance en trois dimensions ayant une portée de 450 km.
Le RAT-31 SL est de conception avancée et peut opérer dans l’environnement complexe de la défense aérienne militaire et du contrôle aérien moderne. Sa technologie permet une adaptation à une vaste gamme de scénarios opérationnels où le brouillage et le fouillis radar sont présents. Le RAT-31 SL utilise plusieurs faisceaux-crayons indépendants, électroniquement contrôlés, pour sonder l’atmosphère ce qui permet une grande flexibilité et un très haut taux de coups au but permettant un meilleur filtrage des échos parasites.
Chaque faisceau est mono-impulsion et permet des mesures précises de l’altitude de la cible, même en mode de vivacité de fréquence. La puissance de pointe réduite permet de déjouer les missiles antiradiations (MAR) et les contre-mesures électroniques (CME). Les défenses pour les contre-mesures électroniques comprennent aussi de faibles lobes secondaires, la diversité de fréquence, un échantillonneur de brouillage et un récepteur indépendant pour la surveillance des CME. Des masques permanents et adaptatifs de détection des cibles mobiles permettent au système de s’adapter en continu à un environnement changeant du fouillis radar (pluie, échos de mer, paillettes de contre-mesures, air clair, etc.).
La configuration mécanique du système permet son démantèlement/assemblage et son transport rapide d’un point à l’autre ce qui assure une meilleure survivabilité sur un théâtre d’opérations.
Antenne primaire
Type et balayage :
- Antenne planaire à réseau de commande ;
- à balayage électronique en élévation et mécanique en azimut ;
- Balayage en élévation : 0° à 20°.
Polarisation : Linéaire/horizontale
Type de faisceau : crayon
Mesure de l’altitude des cibles : mono-impulsion
Vitesse de rotation : 6 min⁻¹.
Transmetteur
Type: Cohérent
Dernier niveau : Tube à ondes progressives
Modulateur : Semi-conducteur
Puissance de pointe : 155 kW
FRI : Décalé
Récepteur
Type : Double conversion superhétérodyne
Récepteurs de radiofréquences : Doubles et adaptés
Sélection de fréquences : Choix de manuelle, au hasard et automatique
Atténuateur de fouillis adaptif : Gain variable dans le temps de la FI avec seuils contrôlés en azimut et portée
Récepteur de FI : Linéaire
Compression des impulsions : Filtres à dispositif à ondes acoustiques de surface, modulation de fréquence par « couinement » (chirp) pour le canal de longue portée et numérique pour le canal de fort FRI (courte portée)
Traitement du signal
Type : Traitement numérique des composantes en sinus et cosinus (I et Q)
Filtres anti-fouillis : Détection des cibles mobiles adaptatif par étapes, utilisation de masques permanents et modifiables en temps réel des échos parasites
Corrélateur d’azimut : Type fenêtre glissante
Détecteurs d’amplitude : Extracteur numérique du module
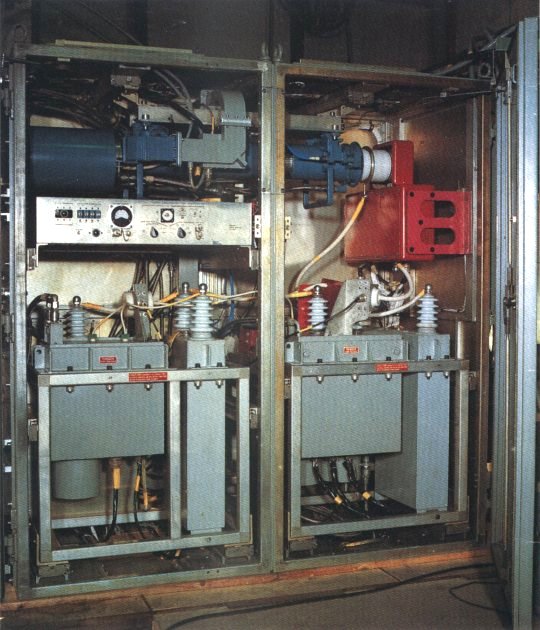
Figure 2 : Électronique du transmetteur à tube à ondes progressives du radar RAT-31SL