Vitesse par paire d’impulsions
Le traitement par paires d’impulsions, appelé aussi par auto-corrélation, est une méthode plus aisée de trouver la vitesse radiale des cibles en comparant la phase (φ) d’impulsions retournées successivement par la cible. On trouve ainsi le Δφ entre chaque paire.
En effet, pour distinguer les cibles en mouvement des objets permanents directement de l'effet Doppler-Fizeau, il faut pouvoir comparer l’onde émise par le radar avec celle retournée par les cibles pour trouver la différence de fréquence. Le calcul montre que la fréquence Doppler (fD) obtenue avec la vitesse de cibles habituelles n’est que de quelques Hertz à quelques kilo-Hz, ce qui n’est qu’une infime fraction de la fréquence de la porteuse de l’impulsion radar (plusieurs méga-Hz ou giga-Hz).
soustraction
la puissance
transmise
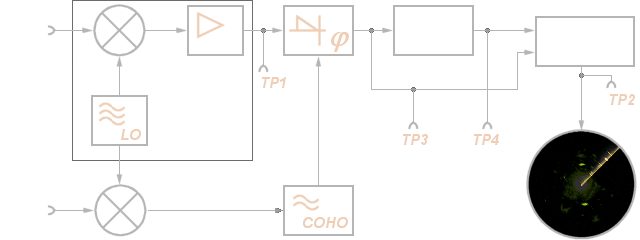
Figure 1 : Schéma fonctionnel d’un récepteur « cohérent à la réception »
soustraction
la puissance
transmise
Figure 1 : Schéma fonctionnel d’un récepteur « cohérent à la réception »
soustraction
la puissance
transmise
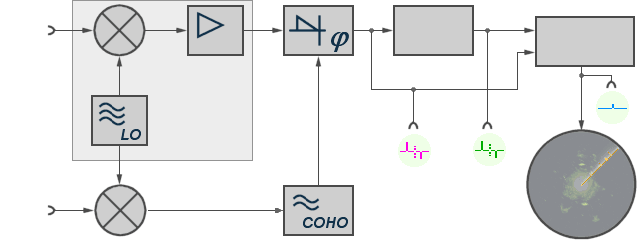
Figure 1 : Schéma fonctionnel d’un récepteur « cohérent à la réception ». (Image interactive)
Il n’est donc pas aisé avec un circuit électronique de pouvoir trouver cette différence. Par contre, la méthode des paires d’impulsions est proportionnelle à la différence de fD par rapport au temps (ΔfD/Δt). Elle dépend du rapport de la vitesse de la cible (en m/s) sur la longueur d’onde (en mètre), ce qui est un rapport beaucoup plus aisé à noter.
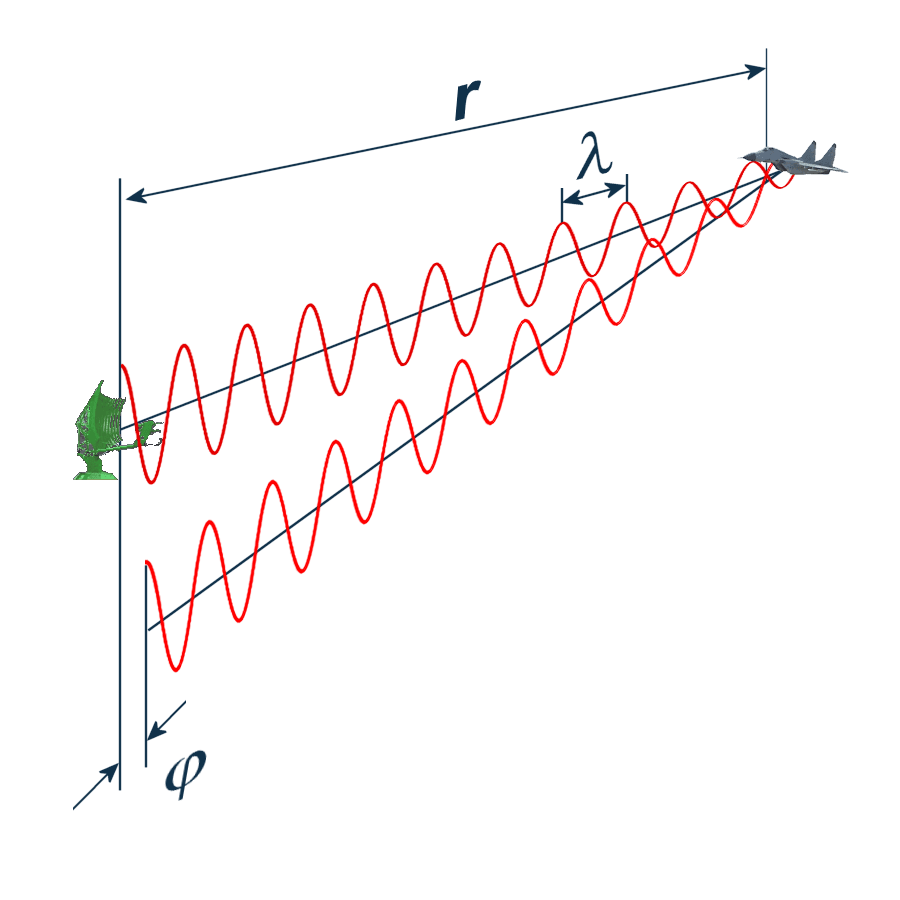
Figure 2 : Le déphasage entre les impulsions.
Pour pouvoir trouver la variation, la phase de chaque impulsion retournée est notée dans une mémoire. À l’origine, il s’agissait d’une mémoire analogique spéciale par tubes à vides, puis d’une chaîne de condensateurs. Dans ce dernier cas, la portée était divisée en un certain nombre de sections, chacune reliée à un condensateur qui se chargeait en recevant le signal d’un écho. À la prochaine impulsion, si le signal était identique la tension à ses bornes ne variait pas et donc sa charge restait la même indiquant un écho permanent. Par contre, si le signal différait, montrant que l’écho avait varié, la tension à ses bornes variait et donc le courant dans le condensateur. Une augmentation de courant était donc interprétée par un écho en déplacement. Maintenant, le signal est traité entièrement par un circuit analogue/numérique et la donnée est conservée dans une mémoire numérique informatique.
Afin de pouvoir procéder à ce traitement, il faut que le radar soit cohérent ou cohérent à la réception. Le détecteur de phase utilise alors un oscillateur cohérent (appelé « Coho » en anglais) pour comparer les impulsions reçues descendues à la fréquence intermédiaire (FI).
{kind=link}
Figure 3 : Oscillogramme de la sortie du détecteur de phase.
Le filtrage des échos permanents, comme ceux de sol, est faite par comparaison de la phase entre plusieurs impulsions successive. Si la phase reste la même d’une impulsion à l’autre, Δφ= 0, l’écho peut être éliminé du traitement radar. Par contre, si la cible a bougé, Δφ≠ 0, l’écho apparaitra à l’écran.
À la sortie du détecteur de phase, le signal provenant d’une cible en mouvement change d’intensité et de polarité à chaque impulsion (figure 3 au centre). Par contre un écho permanent gardera sa valeur et sa polarité (à droite et à gauche de la même figure). Une position dans la mémoire est allouée à chaque unité de résolution en portée. Les résultats du détecteur de phase y sont gardés d’une impulsion à l’autre pour une portée donnée. Les valeurs antérieures et actuelles sont envoyées au soustracteur qui en fait la différence. Les échos permanents seront éliminés par leur amplitude et les cibles mobiles passeront à l’étape suivante ce qui éliminera les premiers de l’analyse (voir point de test 2, ligne bleue, dans la figure 1).
Description des modules dans le diagramme
Figure 3 : Les échos permanents ont une amplitude invariable et sont éliminés:
magenta: signal provenant de l’impulsion X
vert: signal provenant de l’impulsion X-1
bleu: variation seulement pour la cible mobile