Double hétérodyne
Lors du choix de la fréquence intermédiaire (FI), il faut tenir compte des paramètres suivants:
- Aucun autre transmetteur n’opère avec suffisamment de puissance à cette fréquence dans la région;.
- Elle doit être suffisamment basse pour une démodulation;
- Elle doit être adaptée à la gamme de fréquences de réception qui permet d’éviter les fréquences images.
Ces paramètres sont difficiles à concilier et le choix de FI est souvent un compromis pour minimiser leurs effets. Plusieurs récepteurs évitent ce compromis en utilisant une double conversion de fréquence.
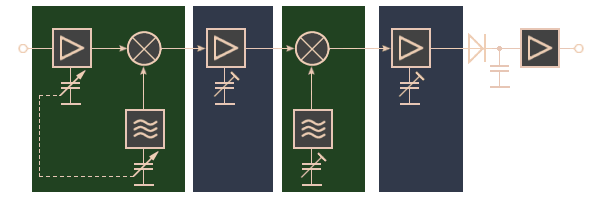
FI1
FI2
Figure 1 : Diagramme fonctionnel d’un convertisseur à double hétérodyne.
FI1
FI2
Figure 1 : Diagramme fonctionnel d’un convertisseur à double hétérodyne.
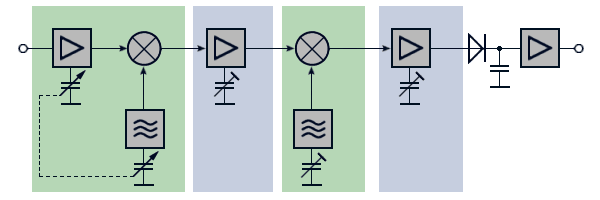
FI1
FI2
Figure 1 : Diagramme fonctionnel d’un convertisseur à double hétérodyne. (Image interactive)
Cette méthode est parfois appelée à double hétérodyne. Les récepteurs l’utilisant ont une très faible bande passante et peuvent éliminer les fréquences images. La double conversion donne également une sélection plus précise de fréquence ce qui permet de discriminer entre deux sources très proches en fréquence.
Syntoniseur (première conversion)
Le syntoniseur est un convertisseur de fréquence comprenant un mélangeur, le premier oscillateur local (OL) et des filtres. Le convertisseur amène le signal d’entrée à la fréquence intermédiaire (FI1), par exemple 500 MHz, grâce au mélange avec la fréquence de l’oscillateur. Après le mélangeur, seule la FI1 désirée reste pour traitement futur.
1ère amplification
Le premier amplificateur ne travaille que sur une gamme de fréquences relativement étroite et donne un fort gain au signal à FI1. Comme cette dernière est assez élevée, par exemple 500 MHz, cette section du circuit nécessitera un blindage pour l’isoler des influences externes. Des mesures de commande automatique de gain doivent être incluses à cette étape.
Second convertisseur
Le signal maintenant à FI1 est à nouveau mélangé, cette fois avec le signal d’un second oscillateur local, ce qui la ramène à une fréquence intermédiaire plus basse FI2. Celle-ci se situe généralement dans la région de 60 à 75 MHz.
Seconde amplification de FI
La seconde amplification travaille aussi sur une plage étroite de fréquences et donne un fort gain au signal. FI2, qui se situe généralement dans la région de 60 à 75 MHz, peut être traitée facilement ensuite pour en extraire l’information sur les cibles radar. L’amplification de FI à ce stade détermine le gain global du récepteur, son rapport signal sur bruit et sa bande passante efface. Typiquement, la seconde amplification est formée d’une série d’amplificateurs, de trois à dix, qui sont variables en bande passante et en gain.
La chaîne d’amplificateurs est le plus souvent logarithmique et ne peut être saturée par le signal sortant du second convertisseur. L’amplification d’un signal tend ainsi vers une limite exponentielle au lieu d’une valeur fixe. Les variations d’amplitude d’un faible signal à FI2 seront perceptibles à la sortie de l’amplification alors qu’avec une série d’amplificateurs linéaires, on pourrait se retrouver avec un signal plat à intensité maximale.
Détecteur
Le détecteur convertit le signal à FI2 en impulsions vidéo. Après amplification, celles-ci seront envoyées à un système d’affichage.
Amplificateur vidéo
L’amplificateur vidéo reçoit les impulsions du détecteur et les amène à une intensité utilisable par le système d’affichage. Il s’agit d’un circuit RC (résistance-condensateur) couplé à un amplificateur de fort gain à transistors. Il doit pouvoir travailler sur une large gamme de fréquences.