Radar à onde continue modulée en fréquence
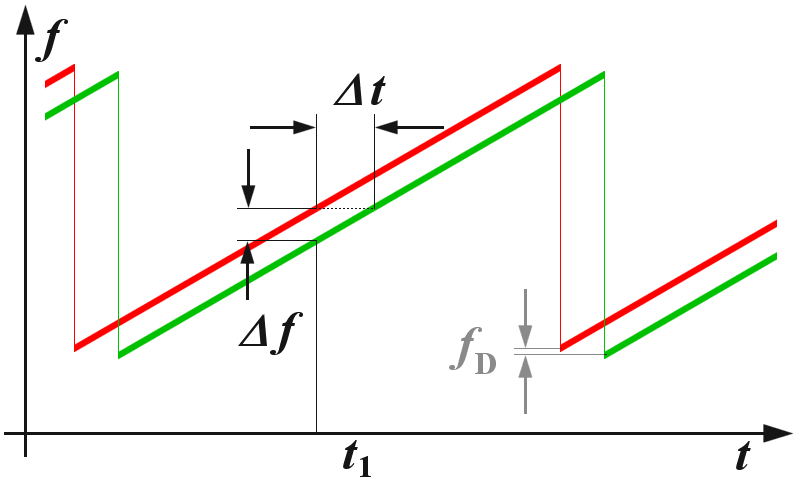
Figure 1 : Mesure de distance par un système à onde continue modulée en fréquence (FMCW)
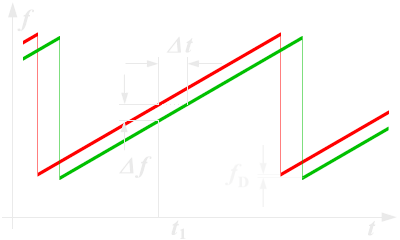
Figure 1 : Mesure de distance par un système à onde continue modulée en fréquence (FMCW)
Radar à onde continue modulée en fréquence
L'inconvénient des radars à onde continue (CW) est leur incapacité à mesurer des distances, puisqu'ils ne produisent pas d’impulsions permettant de mesurer le temps aller-retour de l’onde à une cible. La variation de la fréquence émise apporte une solution à ce problème.
Dans cette méthode, une variation permanente du signal émis autour d'une fréquence de référence est utilisée pour détecter des cibles fixes. Lorsqu'un écho est reçu par le radar, la fréquence du signal réfléchi par la cible peut être mesurée. En se référant à l'instant où la même valeur de fréquence a été émise, il devient possible de mesurer le temps entre l'émission et la réception de cette fréquence, donc la distance radar-cible, comme pour un radar à impulsions.
Comme il est généralement difficile d'émettre « proprement » des fréquences aléatoires, les radars à onde continue modulée en fréquence (FMCW) font varier progressivement la fréquence de leur signal au rythme de rampes ascendantes et descendantes.
Cible fixe
Les caractéristiques d’un radar à onde continue modulée en fréquence sont :
- La distance est mesurée en comparant la fréquence reçue avec celle émise, habituellement celle au moment de la réception ;
- La durée d’un cycle de transmission du signal émis doit être beaucoup plus grande que le temps aller-retour de la distance à mesurer.
La distance R de la cible est alors donnée par l’équation suivante :
| R = | c0 · |Δt | | = | c0 · |Δf | | Where: | c0 = vitesse de la lumière = 3·108 m/s Δt = écart de temps mesuré [s] Δf = différence des fréquences notées [Hz] R = distance de la cible [m] df/dt = décalage de fréquence par unité de temps |
(1) |
| 2 | 2 · (df/dt) | |||||
Comme la différence absolue des fréquences ne peut être que positive, les fréquences négatives n’existant pas, le résultat avec une fréquence augmentant linéairement est égal à une fréquence en diminution dans un scénario où il n’y pas d’effet Doppler-Fizeau (cible à distance fixe).
Si le changement est linéaire sur une large gamme de fréquences, la portée du radar peut être explorée avec une comparaison simple des fréquences. La différence Δf est alors proportionnelle à la distance R
Par exemple, pour un radar ayant une variation de fréquences données sur 1 milliseconde, la portée maximale mesurable théorique sans ambiguïté est de moins de 150 km. Cette distance comprend le temps nécessaire à la superposition des signaux transmis et retournés pour calculer Δf. En pratique, la portée maximale est moindre à cause de la faible puissance du signal transmis en onde continue et du fait qu’il doit rester assez de temps pour mesurer la Δf.
Si la gamme de fréquences de modulation du transmetteur de ce radar est de 250 MHz et que le temps pour retourner au début de la gamme est de 4 nanosecondes (la chute de la dent de scie), ce qui correspond à 1 kHz, la résolution en distance est alors de 0,6 mètre
Cet exemple montre les avantages d’un radar à onde continue modulée en fréquence quand on compare la simplicité de sa construction avec la complexité d’un radar à impulsion qui doit avoir une même résolution de 4 ns. En effet, une différence de 1 kHz est dans la gamme audio et facile à mesurer.
Cible mobile
Lorsque l’objet de sondage a une vitesse radiale par rapport au radar, le décalage Doppler (fD) modifie alors le résultat. En effet, la différence de fréquence Δf' est à ce moment égale à Δf + fD. Selon la direction du déplacement de la cible par rapport au radar, cette différence va varier :
- La fréquence relative de l’écho va augmenter si l’objet se rapproche ;
- La fréquence relative de l’écho va diminuer si l’objet s’éloigne.
Ainsi à la variation en dent de scie de la fréquence de la figure 1 va s’ajouter fD (positif ou négatif). En utilisant une variation miroir de celle-ci, fD se soustrait.
Types de modulations
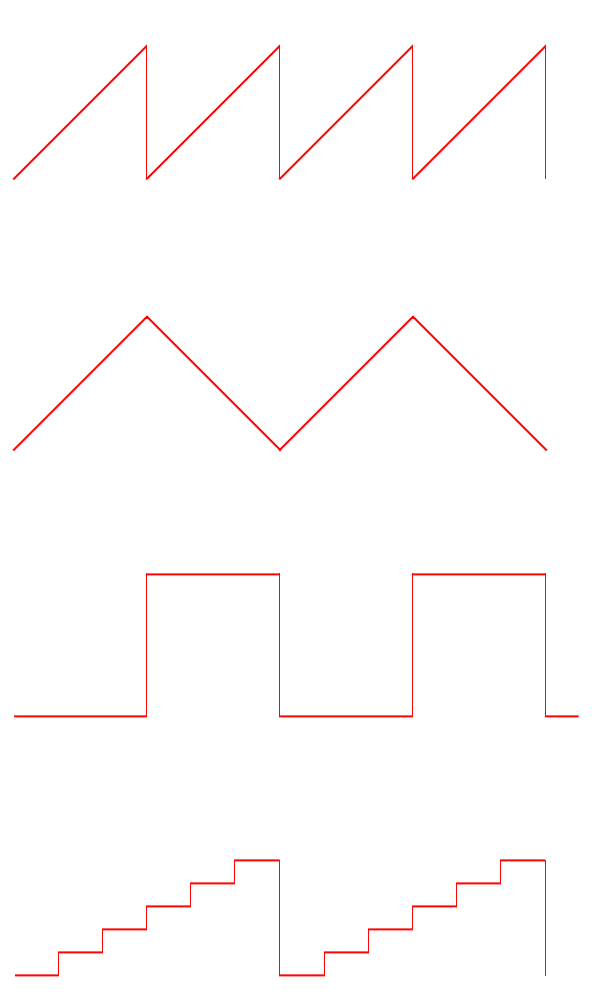
Figure 2 : Quelques types de modulations populaires pour un radar à onde continue modulée en fréquence.
Figure 2 : Quelques types de modulations populaires pour un radar à onde continue modulée en fréquence.
Il y a plusieurs types de modulations utilisées selon les besoins :
- Modulation en dent-de-scie
Utilisée pour une grande portée du radar et dans une situation avec un minimum d’influence du décalage Doppler (ex. un radar de navigation maritime) ; - Modulation triangulaire
Permet une séparation facile de Δf et fD (la valeur de fD s’inversant entre la montée et la descente en fréquence) ; - Modulation carrée (modulation par déplacement de fréquence)
Utilisée pour une mesure très précise de la distance à courte portée en comparant les retours de deux fréquences. Cependant, les signaux de plusieurs cibles simultanées ne peuvent être séparés et la portée maximale non ambigüe est très petite ; - Modulation en escalier
Utilisée dans les mesures par interférométrie, elle étend la portée maximale non ambigüe.
Modulation en dent-de-scie
Dans le changement linéaire en dent-de-scie (figure 2 en haut), la fréquence de l’écho de retour est déplacée dans le temps vers la droite. Quand on compare la fréquence de l’écho avec la fréquence émise au moment de la réception, un battement se produit et donne la différence des deux fréquences et donc la distance parcourue aller-retour de la cible.
Lorsque qu’un décalage Doppler est inclus dans la différence de fréquence, il l’augmente (cible s’approchant) ou diminue (s’éloignant) d’une valeur fixe fD. Avec cette modulation, il n’y a aucun moyen de séparer la variation due à la distance de celle de la vitesse radiale. En conséquence, cette dernière entre dans l’erreur de mesure de la distance. En choisissant la gamme de fréquences balayée en dent-de-scie, le concepteur doit minimiser l’erreur intrinsèque de mesure et prévoir des fréquences qui seront beaucoup plus grandes que le décalage Doppler anticipé des cibles.
.print.jpg)
de l’écho
Figure 3 : Relation de fréquences entre les signaux transmis et retournés avec une variation triangulaire.
.png)
de l’écho
Figure 3 : Relation de fréquences entre les signaux transmis et retournés avec une variation triangulaire.
Ce type de variation est utilisé, entre autres, pour la navigation car les bateaux dans les eaux côtières ont une vitesse faible, par exemple 10 m/s. Un radar à onde continue modulée en fréquence, généralement en bande X, sera alors confronté à un décalage Doppler maximal de 666 Hz. En utilisant une résolution du kilohertz par mètre, le décalage devient négligeable. D’un autre côté, le même radar ne pourrait pas être utilisé dans un aéroport où les avions décollent avec une vitesse de 200 m/s car cela donnerait une erreur sur la distance plus grande que la mesure réelle. La cible apparaîtrait alors à une distance négative, à gauche du zéro de l’écran.
Modulation triangulaire
de l’écho
Figure 3 : Relation de fréquences entre les signaux transmis et retournés avec une variation triangulaire.
Dans une variation triangulaire de la fréquence, la mesure de la distance peut être faite sur les parties ascendantes et descendantes de la variation comme dans la figure 3. L’écho dans ce cas est décalé en fréquence vers la droite (ligne verte) par rapport à celle du signal émis et sa valeur absolue reste la même en montée ou descente de fréquence.
Par contre, si un décalage Doppler est inclus dans l’écho, cela change sa fréquence d’une valeur fixe fD qui s’ajoute à Δf partout sur le graphique lors de la montée en fréquence et qui s’y soustrait dans la descente (voir figure 3). Ceci ouvre la possibilité de faire une mesure précise de la distance, malgré la présence du décalage Doppler, en trouvant la moyenne des valeurs de la fréquence de l’écho au point où il y a changement de la pente de la variation triangulaire des fréquences. Cela permet également de trouver la vitesse radiale de la cible : le décalage Doppler est la moitié de la somme des différences de fréquences trouvées en montée et en descente.
Comme tout ce calcul doit se faire à partir de valeurs à deux moments distincts du cycle complet de la variation triangulaire, il requiert un traitement des données numériques avec une mise en mémoire des valeurs intermédiaires.
Le calcul de la Δf et de fD à partir de cette méthode se fait ainsi :
| f (R) = | Δf1 + Δf2 | mit |
f (R) = fréquence comme mesure de la distance fD = décalage Doppler donnant la vitesse radiale Δf1 = différence de fréquence au pic de montée Δf2 = ddifférence de fréquence au bas de descente |
(2),(3) |
| 2 | ||||
| fD = | |Δf1 - Δf2| | |||
| 2 |
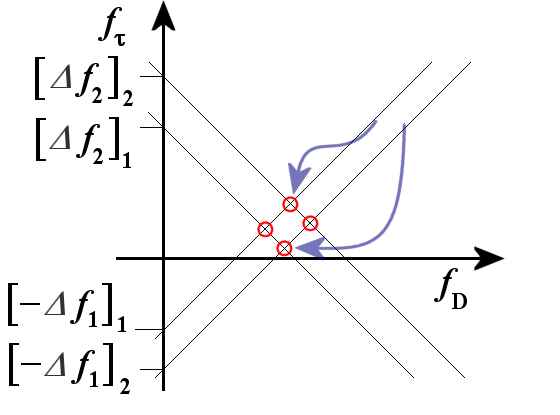
Figure 4 : Cibles fantômes trouvés par la différence de fréquences sur le graphique.
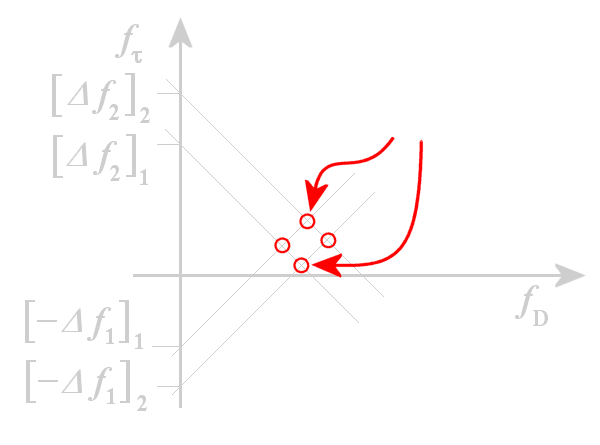
Figure 4 : Cibles fantômes trouvés par la différence de fréquences sur le graphique.
La fréquence f (R) dans de la formule (1) donne ensuite la distance réelle de la cible.
Cette méthode a un désavantage dans le cas de cibles multiples : elle ne peut différencier le fD de chacune d’elles. Le f (R) trouvé est soit une moyenne, soit celui de la cible la plus véloce et lorsque qu’appliquée autres cibles, elles créent des cibles fantômes. La figure 4 montre une telle situation où la première cible correspond à [-δf1]1 + fD et [+δf2]1 - fD. L’intersection des deux lignes est la position de la cible 1. Si une cible 2 apparait durant le même cycle de transmission triangulaire, elle obtient des [-δf1]2 et [+δf2]2 différents ce qui donne quatre points d’intersection pour le calcul de la distance. Deux de ces intersections correspondent à des cibles fantômes qui dépendent de la pente du cycle triangulaire. La solution réside en changeant cette pente sur des cycles successifs de modulation. Ainsi, seules les vraies positions resteront fixes et les cibles fantômes se retrouveront à des positions différentes.
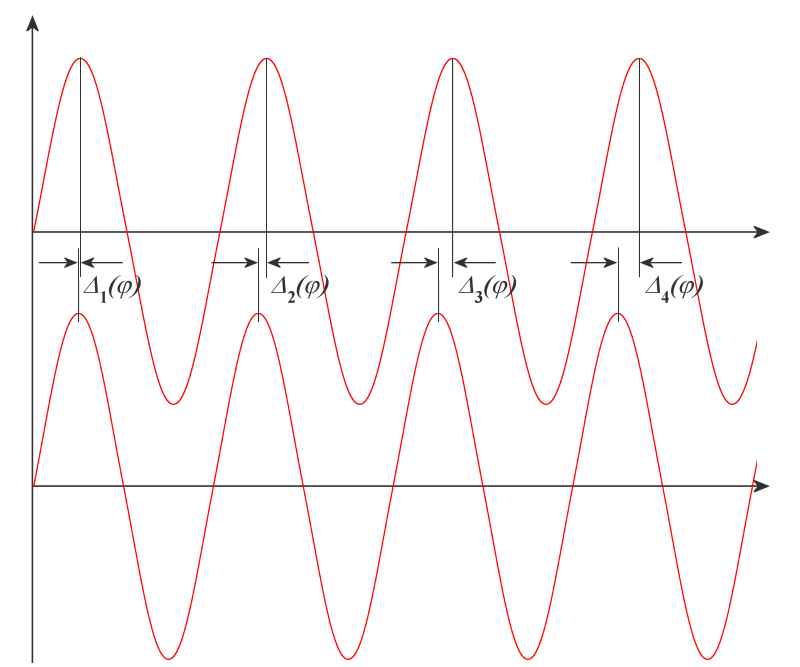
Figure 5 : La différence de phase Δn(φ) est une mesure pour savoir comment les longueurs d’ondes sont égales à deux fois la distance (aller-retour).
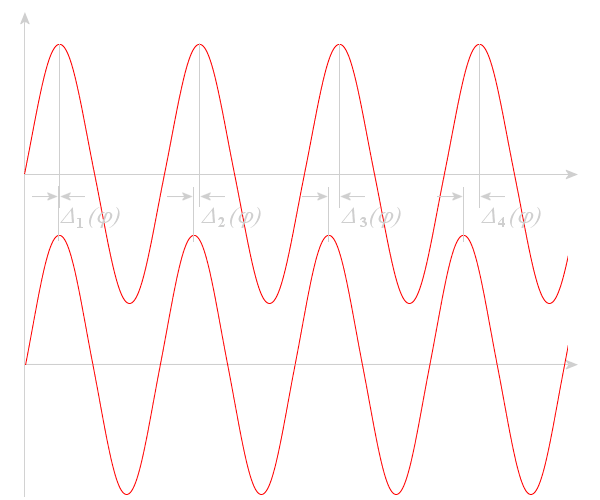
Figure 5 : La différence de phase Δn(φ) est une mesure pour savoir comment les longueurs d’ondes sont égales à deux fois la distance (aller-retour).
Modulation par déplacement de fréquence
Dans cette modulation l’émetteur-récepteur est relié à un interrupteur qui varie entre deux fréquences prédéfinies. L’émission alterne de l’une à l’autre de deux fréquences durant des périodes de l’ordre de la milliseconde. Il y a deux façons de traiter le signal de sortie et l’écho :
- Mesurer la durée entre les deux états ce qui transforme l’onde continue en une simili-impulsion dont la longueur est reliée à la distance cible-radar ;
- Mesurer la différence de la phase des échos revenant des deux fréquences émises.
La première méthode donne une valeur imprécise et elle est très complexe technologiquement parlant ce qui fait qu’elle n’est moins utilisée.
Dans la seconde, à la sortie du mélangeur (voir le diagramme), une valeur de tension donne la mesure de la différence de phase entre l’onde émise et l’écho revenant de la cible, cette différence est égale à la distance. Comme les deux signaux comparés ne se produisent pas au même moment, il faut une mémoire numérique pour conserver la fréquence émise.
Cependant, à cause de la périodicité d’une onde sinusoïdale, la portée non ambigüe de cette méthode est limitée car la différence de phase entre les deux signaux doit être à l’intérieur de la moitié de la longueur d’onde. Ainsi, une différence de 20 MHz entre les deux fréquences transmises donne une portée maximale non ambigüe de 15 mètres. De multiples cibles à l’intérieur de cette portée ne peuvent être séparées car un seul déphasage peut être mesuré dans le mélangeur. Elles se superposent dans la tension de sortie et c’est l’écho le plus fort qui domine le résultat.
Lorsque les deux méthodes (en temps et phase) sont appliquées simultanément, la dépendance de la distance/temps peut devenir une évaluation grossière. Le résultat détaillé du déphasage peut être répété plusieurs fois pour raffiner la valeur de la distance jusqu’à ce qu’il soit assez près de celui provenant de la mesure temporelle de simili-impulsion ce qui augmente la portée non ambigüe.
Modulation en escalier
La modulation en escalier a grosso-modo les mêmes avantages et désavantages que celle carrée mais utilise plusieurs fréquences successives au lieu de deux qui alternent. Avec chaque fréquence, on peut mesurer un déphasage entre l’écho et le signal émis sur ce qui augmente considérablement la distance non ambigüe. En effet, la distance mesurée dépend maintenant de deux variables : la relation entre les fréquences émises et retournées ainsi que le déphasage.
Cette méthode est intéressante en particuliers s’il a résonnance pour des composantes individuelles de fréquences observées à des points irréguliers des cibles. Cette méthode donne alors un champ d’interférences, c’est donc de l’interférométrie..
Diagramme d’un circuit du capteur radar FMCW
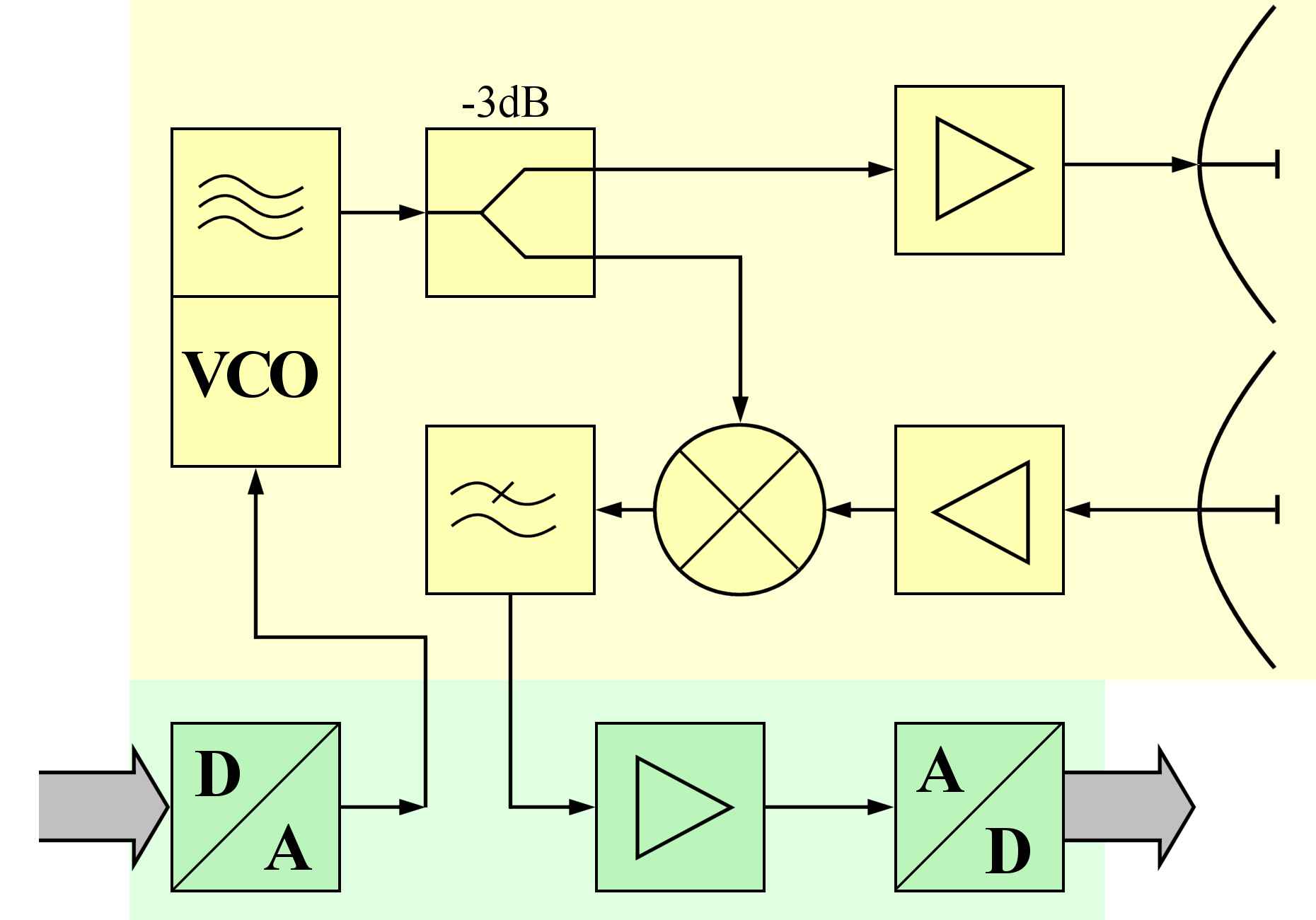
Figure 6 : Diagramme d’un circuit du capteur radar FMCW
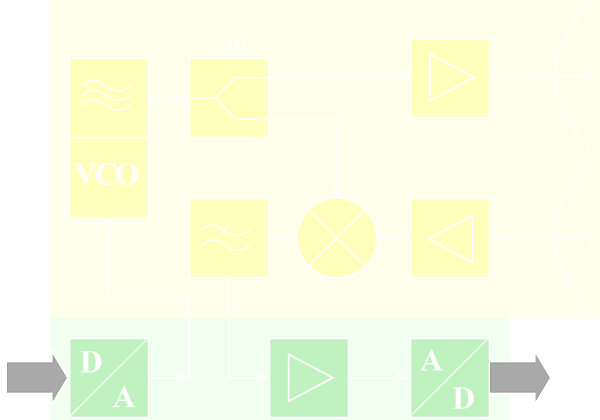
Figure 6 : Diagramme d’un circuit du capteur radar FMCW (Image interactive)
Un radar à onde continue modulée en fréquence compte une émetteur-récepteur et une unité de contrôle à microprocesseur. Le module émetteur-récepteur est compacte et comprenant habituellement une antenne à plaque (« patch »). La haute fréquence produite par un oscillateur contrôlé par tension est directement injectée dans l’antenne ou passe par un étage d’amplification d’abord. Une partie de la fréquence est dérivée vers un mélangeur qui traite le signal amplifié revenant de l’écho à la bande de base (bande de fréquences combinée à une porteuse reconstituée par démodulation).
Le circuit de contrôle contient un microprocesseur qui dirige les fonctions de l’émetteur-récepteur, convertit les échos en format numérique et connecte, habituellement par câble USB, la connexion vers un ordinateur personnel ou portable pour le traitement des données. Il utilise convertisseur analogue-numérique pour produire la tension nécessaire au contrôle des fréquences. La tension de sortie du mélangeur est numérisée.
Si une seule antenne est utilisée, alors ce radar nécessite un circulateur à ferrites pour séparer la transmission de la réception. Cependant, une antenne plaque actuelle comporte une composante pour chaque direction et est donc moins coûteuse. En effet, sur un substrat commun se trouve une antenne émettrice et une autre réceptrice, l’une au-dessus de l’autre. La polarisation des antennes est souvent décalée de 180° et un grillage de blindage placé entre les deux minimise la rétroaction d’une antenne sur l’autre (diaphonie). Comme la mesure se fait avec la différence de fréquence entre l’émission et l’écho, le signal de diaphonie restant peut être éliminé lors du traitement car sa fréquence est pratiquement la même que le signal émis.
En onde continue non modulée, seul le décalage Doppler peut être traité. Ceci inclus les fréquences jusqu’à 16,5 KHz dans une émetteur-récepteur dans un radar à onde continue modulée en fréquences de bande K, (environ 24 GHz) et la vitesse mesurée ne peut donc pas dépasser 360 km/h. Le microprocesseur utilisé sera un processeur simple audio-stéréo qui est produit en vastes quantités et utilisé par exemple dans une carte de son pour ordinateur PC. Même la méthode de modulation par onde carrée simple peut utiliser un tel microprocesseur sous certaines conditions.
Par contre, le récepteur radar en onde continue modulée en fréquences dans la plupart des applications doit pouvoir traiter une plus large gamme de décalages, donc des fréquences jusqu’à 250 MHz sont nécessaires. Ceci a une incidence marquée sur la bande passante de l’amplificateur qui suit le récepteur et sur l’échantillonnage fait par le convertisseur analogue-numérique. Donc, le circuit électronique d’un radar à onde continue modulée en fréquences est plus coûteux que celui sans modulation.
Il existe sur le marché en 2013 plusieurs capteurs ou modules radar en onde continue modulée en fréquences comprenant un émetteur-récepteur avec antenne à plaque intégrée. Ils sont basés souvent sur un circuit intégré monolithique hyperfréquences (MMIC) du type TRX_024_xx (voir détails techniques) de Silicon Radar donnant une puissance de sortie de 6 dBm. Cette puce opère dans la bande K, (24,0 à 24,25 GHz) ce qui permet de mesurer à la fois la vitesse radiale et la distance. La modulation dépend d’un contrôle de tension et elle est connectée à un circuit externe à voltage fixe (mode en onde continue non modulée) ou à un processeur relié à la sortie variable d’un convertisseur analogue-numérique. Le signal sortant du mélangeur donne habituellement les valeurs de I et Q qui doivent être amplifiées avant de convertisseur.
Radar FMCW produisant une image

Figure 7 : Réseau d’antenne à plaque pour un radar de navigation maritime à onde continue modulée en fréquences en Bande X.
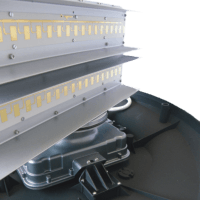
Figure 7 : Réseau d’antenne à plaque pour un radar de navigation maritime à onde continue modulée en fréquences en bande X,
Un radar produisant une image de son environnement doit obtenir par sondage la position de chaque cible et l’afficher sur un moniteur. La résolution en distance dépend plus de la résolution des pixels de l’écran que de l’habilité à déterminer la vitesse de la cible. La résolution de l’écran doit donc être très fine de telle façon que pour chaque donnée en distance, il y ait aux moins deux pixels disponibles de telle sortes que la cible puisse être positionnée le plus exactement possible. Ainsi, si sa distance est exactement entre deux pixels, les deux seront illuminés ce qui fait que sur des sondages successifs de la cible restera visible malgré son mouvement qui peut être entre les pixels de l’écran.
Les radars à bande large (Broadband-Radar™) pour la navigation maritime balayent une plage de fréquences en ondes continue puis cessent l’émission quand la portée prédéterminée est atteinte. La méthode ressemble donc plus à la transmission d’une impulsion avec modulation intrapulse. La cassure de transmission n’influence par la portée maximale non ambigüe mais il est nécessaire de lire la distance de la cible dans une mémoire et de la transmettre sans perte par une ligne passante bande mince vers l’affichage. À cause de son mode d’opération, la comparaison entre l’écho et le signal transmit est disponible sur toute la distance sondée, il demeure un type de radar à onde continue modulé en fréquence mais avec des périodes muettes de quelques millisecondes.
Considérant la résolution, avec un radar à bande large de décalage de fréquences de 65 MHz par milliseconde, il est possible d’obtenir une bonne image si :
- Pour une mesure non ambigu la durée du cycle (figure 1) doit être d’un maximum de 500 µs ce qui correspond à une portée maximale de 75 km ;
- La déviation en fréquences correspond ainsi à un changement de 65 Hz par nanoseconde. En utilisant un filtre approprié pour obtenir une résolution de 1 kHz, il faut mesurer des différences de fréquences à chaque 15 nanosecondes, ce qui correspond à une résolution de 2 mètres ;
- Pour une évaluation opérationnelle des différences de fréquences de 1 MHz, possible avec les micro-ordinateurs actuels, la portée maximale sera de 4000 mètres (sans microcontrôleur, il faudrait 4000 filtres individuels en parallèle) ;
- À cause de la méthode utilisée, la précision de la mesure est à peu près égale à la résolution en portée et elle est limitée par la résolution de l’écran.
Le radar à onde continue module en fréquences peut donc donner une résolution spatiale très grande qui se compare à celle d’un radar pulsé avec des impulsions de l’ordre de la nanoseconde. Cela implique pour le radar pulsé une largeur de bande de l’impulsion d’au moins 80 MHz, et pour la numérisation de l’écho, un échantillonnage de 166 MHz.
Radar à onde continue sans image

Figure 8 : Affichage analogue d’un radioaltimètre.
Dans cette configuration, la différence de phase entre le signal et l’écho est notée directement et le radar ne peut déterminer que la distance de l’écho dominant mais avec une précision de l’ordre du centimètre. Le résultat est indiqué sur un cadran, comme dans la figure 8, ou comme une donnée numérique. Dans un affichage analogue, la bobine d’induction qui fait bouger l’aiguille avec l’impédance qui dépend le décalage en fréquence. Comme ce dernier n’est pas linéaire, l’échelle du cadran ne l’est pas non plus.
Ce type d'équipement est souvent utilisé comme « radioaltimètre » pour mesurer la hauteur exacte d'un avion durant la phase d'atterrissage. Les radioaltimètres sont également intégrés dans les systèmes d'alerte et d'évitement de terrain (GAWS), informant le pilote que l'avion vole trop bas ou que la distance avion-sol diminue.