Qu'est-ce géoradar?
Radar à pénétration de sol (ou géoradar)

et affichage
le transmetteur,
le récepteur
et les antennes
du capteur
Figure 1 : Géoradar en action,
© 2010 Swedish History Museum, Stockholm

et affichage
le transmetteur,
le récepteur
et les antennes
du capteur
Figure 1 : Géoradar en action,
© 2010 Swedish History Museum, Stockholm
en « sombrero »
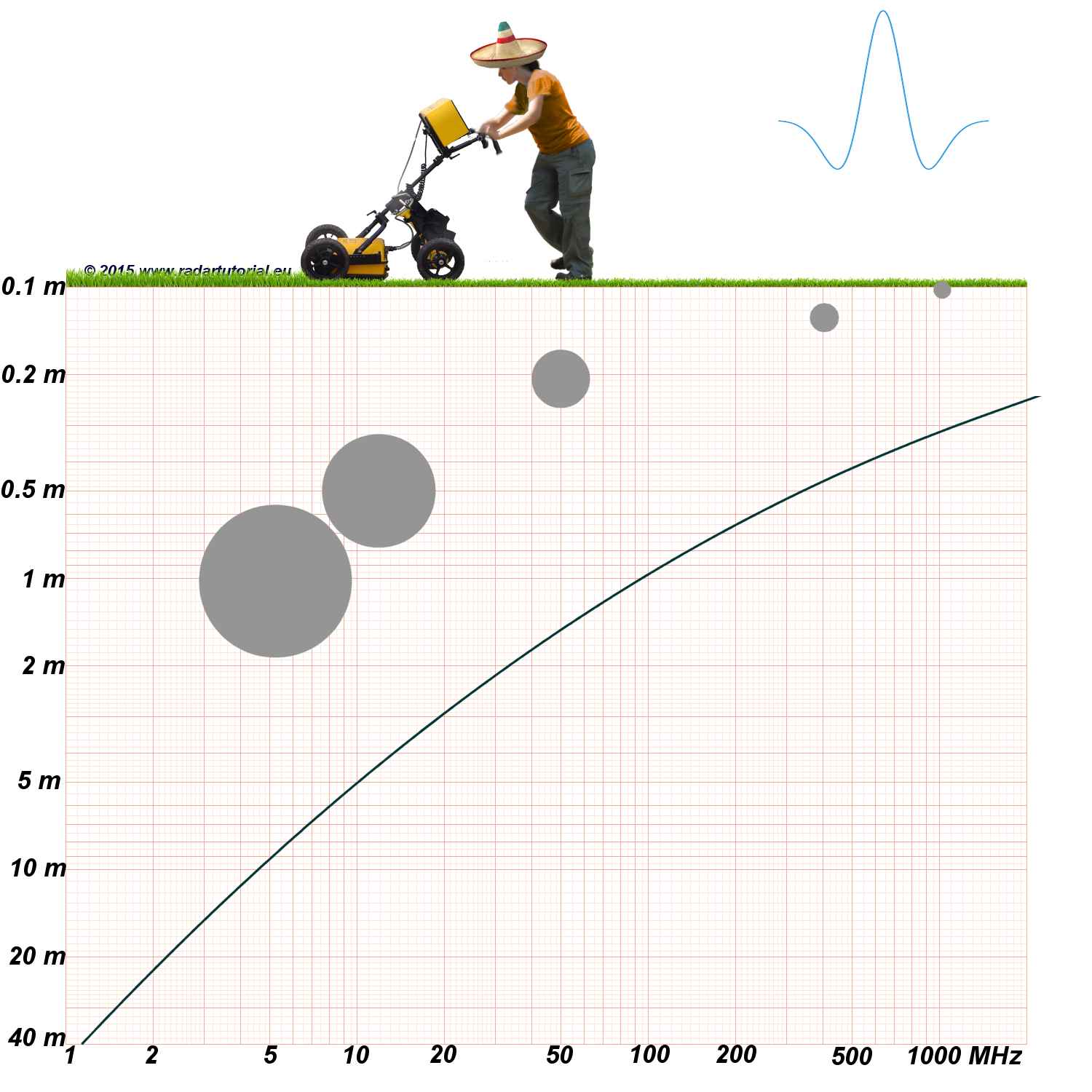
Figure 2 : La fréquence de la porteuse est un compromis entre la profondeur à sonder et la résolution du radar,
© 2015 Christian Wolff, www.radartutorial.eu
en « sombrero »
Figure 2 : La fréquence de la porteuse est un compromis entre la profondeur à sonder et la résolution du radar,
© 2015 Christian Wolff, www.radartutorial.eu
Radar à pénétration de sol (ou géoradar)
Le radar à pénétration de sol, ou géoradar, est un instrument utilisé en géophysique pour connaître la structure de la couche supérieure du sol à grande résolution. Il fonctionne avec des ondes électromagnétiques de haute fréquence qui peuvent pénétrer le sol. L’énergie radiée est réfléchie par tout changement des propriétés électriques dans la structure du sous-sol sans le perturber.
Ce type de radar, développé dans les années 1970, est utilisé en archéologie, en études environnementales, en ingénierie, en recherche d’indices par la police, etc. Il s’agit d’une utilisation des radars à bande ultra large (généralement 300 MHz à 3 300 MHz). Cette technique est peu coûteuse, facile d’utilisation et le rayonnement est inoffensif pour les humains puisqu’il est de l’ordre du milliwatt.
Principe
Le radar à pénétration de sol est déplacé lentement au-dessus de la surface à sonder et le faisceau balaie ainsi une couche plus ou moins épaisse sous celui-ci. Selon le système et la nature des sols, un tel radar peut sonder jusqu’à quelques dizaines de mètres sous la surface et donner une série de tranches verticales. L’énergie réfléchie dépend des propriétés du matériau traversé et le radar peut ainsi détecter la profondeur, la conductivité, la permissivité, la densité et la position d’objets enfouis. C’est le temps aller-retour du signal qui donne la profondeur de ceux-ci.
en fréquence
bande de base
du bruit
en fréquence
bande de base
du bruit
bande de base
Il est possible de classer les géoradars en deux catégories : les radars à signal pulsé et ceux à onde entretenue. Dans le premier cas, l’antenne émet une série d’impulsions et capte les échos provenant du sous-sol. Ils opèrent donc dans le domaine temporel en reliant la profondeur des cibles au temps écoulé entre l’émission et la réception. Afin d’obtenir une large bande passante, les impulsions sont extrêmement courtes, de l’ordre de la nanoseconde ou moins. Le transmetteur ne module pas en fréquence l’onde porteuse mais plutôt génère une impulsion d’amplitude, typiquement de 20 à 200 V, dite de bande de base. La forme de ces impulsions ressemble à un « sombrero mexicain » décrit mathématiquement par une dérivée négative normalisée de second ordre d’une courbe Gaussienne.
Les géoradars qui transmettent des ondes continues modulées, avec décalage en fréquence entre le signal émis et l’écho, sont considérées comme des systèmes travaillant en représentation de fréquence. La plupart de ceux-ci utilisent une variation de fréquence en escalier car leur conception est plus simple et leur coût plus bas. Cependant, leur utilisation demande plus de temps. Le temps aller-retour des échos est obtenu par la transformée inverse de Fourier et pour obtenir un meilleur rapport signal sur bruit, il faut intégrer un grand nombre d’échos provenant de la même cible.
Le choix de la gamme de fréquences utilisées pour un géoradar est un compromis entre la résolution des données et la profondeur de sondage. Plus basses sont les fréquences, plus elles se rendent profondément dans le sous-sol mais moindre est la résolution (les cibles doivent être de plus grande que la longueur d’onde pour être visibles). La figure 2 donne un aperçu de la résolution à 1 MHz : un tel radar de pénétration de sol peut détecter des objets jusqu’à 30 ou 40 mètres de profondeur mais ne peut distinguer deux cibles que si elles sont espacées d’au moins 2 mètres. De plus, le signal est atténué différemment selon la composition du sol : la glaise étant le médium le plus absorbant et le sable sec celui qui laisse passer le plus facilement les ondes.
Le facteur essentiel de la résolution verticale est la bande passante réelle des échos. Pour la résolution horizontale, la forme du faisceau émis par l’antenne est le facteur déterminant. Cette dernière peut être améliorée par un traitement des échos similaire à celui un radar à synthèse d’ouverture (RSO), mais l’effet est faible parce que la vitesse de propagation dans le sol hétérogène n’est pas constante.
Une source d’interférences pour un géoradar est l’émission des téléphones mobiles. Il faut donc que l’opérateur mette hors-circuit celui qu’il porte. Une autre façon est coder la phase de la modulation du radar, ce qui est possible pour un appareil à onde entretenue modulée en fréquence de bande mince.
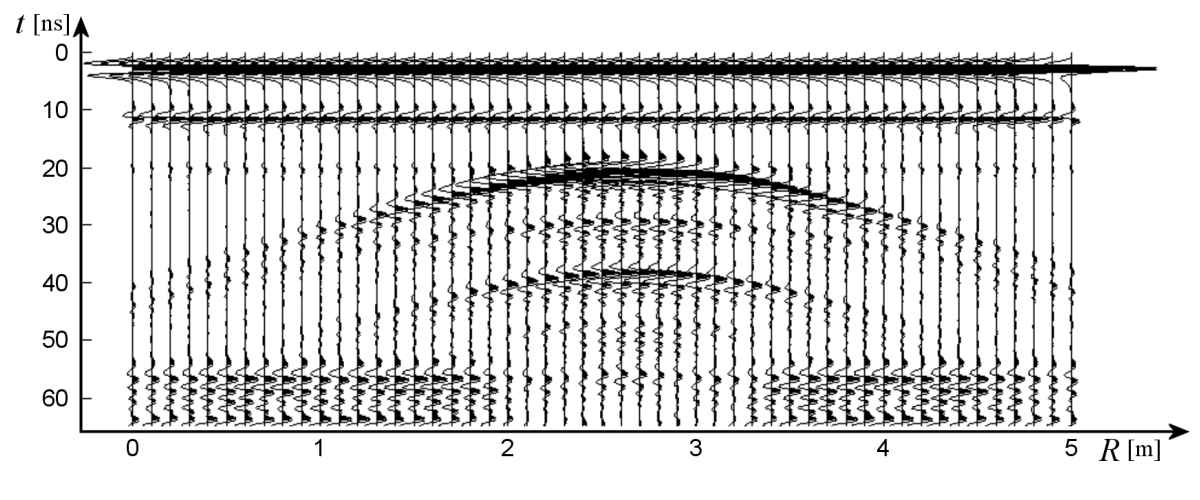
Figure 3 : Plusieurs données en coupe (affichage A avec une rotation de 90 degrés) ont été assemblées en une seule sortie par rapport à la profondeur (affichage B). La portion positive des impulsions a été remplie en blanc ce qui simule une intensité à l’écran.
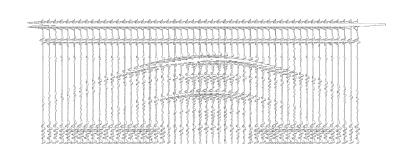
Figure 3 : Plusieurs données en coupe (affichage A avec une rotation de 90 degrés) ont été assemblées en une seule sortie par rapport à la profondeur (affichage B). La portion positive des impulsions a été remplie en blanc ce qui simule une intensité à l’écran.
Traitement du signal dans un géoradar
ALe déplacement du radar génère une image brute d’une coupe verticale du sol. Comme la fréquence utilisée ne permet pas une faible ouverture du faisceau, tous les objets rencontrés lors du sondage renvoient des échos, même s’ils ne se trouvent pas exactement à la verticale du radar. Tous les échos reçus sont quand même affichés comme si c’était le cas ce qui veux dire que ceux venant d’une direction latérale, et donc ayant parcouru une plus grande distance, sont positionnés à une plus grand profondeur qu’ils le sont en réalité. De plus, la forme d’un écho est hyperbolique et sa position réelle se trouve à l’apex de l’hyperbole.
Dans l’image brute, au moins une ligne continue d’échos est affichée près de la surface. Celle-ci est causée par la réception du signal de l’antenne émettrice par l’antenne réceptrice dans l’air sous le radar. Elle est souvent désignée comme « le premier retour aérien » et sera éliminée plus tard par traitement du signal. Une seconde ligne est également notée, celle-ci provenant du retour par la réflexion au changement de milieu entre l’air et le sol.
Avec un bon traitement des échos par filtres électroniques, il est possible de préciser la position réelle des objets sous la surface. Ces filtres réduisent les pertes par diffusion, les échos de bruit et ceux provenant de retour par les inhomogénéités de la couche traversée causant du fouillis radar. L’amplification du signal peut également être variée selon le temps de réception pour compenser l’atténuation du parcours dans le sol.
La transposition du temps de parcours en distance/profondeur n’est cependant pas simple. La vitesse de propagation des ondes électromagnétiques varie avec le type de sol et celui-ci n’est pas homogène. Dans un sol sec la vitesse est la moitié de celle dans l’air, mais dans un sol mouillé ou dans la glaise, il est seulement entre le quart et le dixième. Il faut donc au moins avoir une idée de la composition du sous-sol avant de faire des mesures, ce qui peut être obtenu par des tests sismiques ou, encore mieux, par la prise de carottes.
Le résultat d’un sondage vertical peut être montré sur un oscilloscope comme un affichage A : amplitude sur l’axe Y comparé au temps de retour signal des échos sur l’axe X. Une rotation à 90 degrés de cette donnée est appelée « la trace ». Un graphique de type affichage B peut être construit avec une suite de mesures lors du déplacement du radar dans une direction pour donner une coupe verticale : les échos se retrouvent sur l’axe Y et l’axe X représente la distance parcourue en surface. Les échos sont alors différenciés par leur intensité ou par un schème de couleurs.
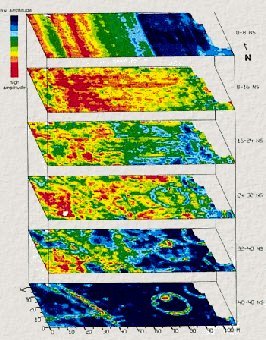
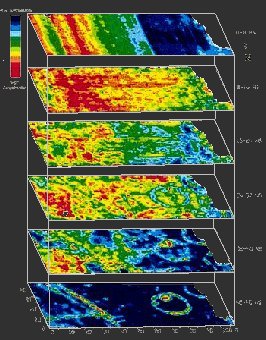
Finalement, plusieurs coupes verticales peuvent être assemblées en ce qui est alors appelé un affichage C : les axes X et Y deviennent des coordonnées cartésiennes horizontales du site sondé et l’affichage montre les échos à une profondeur choisie. La figure 5 montre une série de coupes horizontales ainsi obtenues.
Les images provenant des affichages A, B ou C sont appelées « radargramme » dans les publications et la technique pour les obtenir « radargrammétrie ». Il est à noter que ces différents affichages ne doivent pas être confondus avec ceux des radars classiques de surveillance (affichages A, B et C).
servant d’éléments
radiants
de l’impulsion
entre l’élément radiant
et le réflecteur
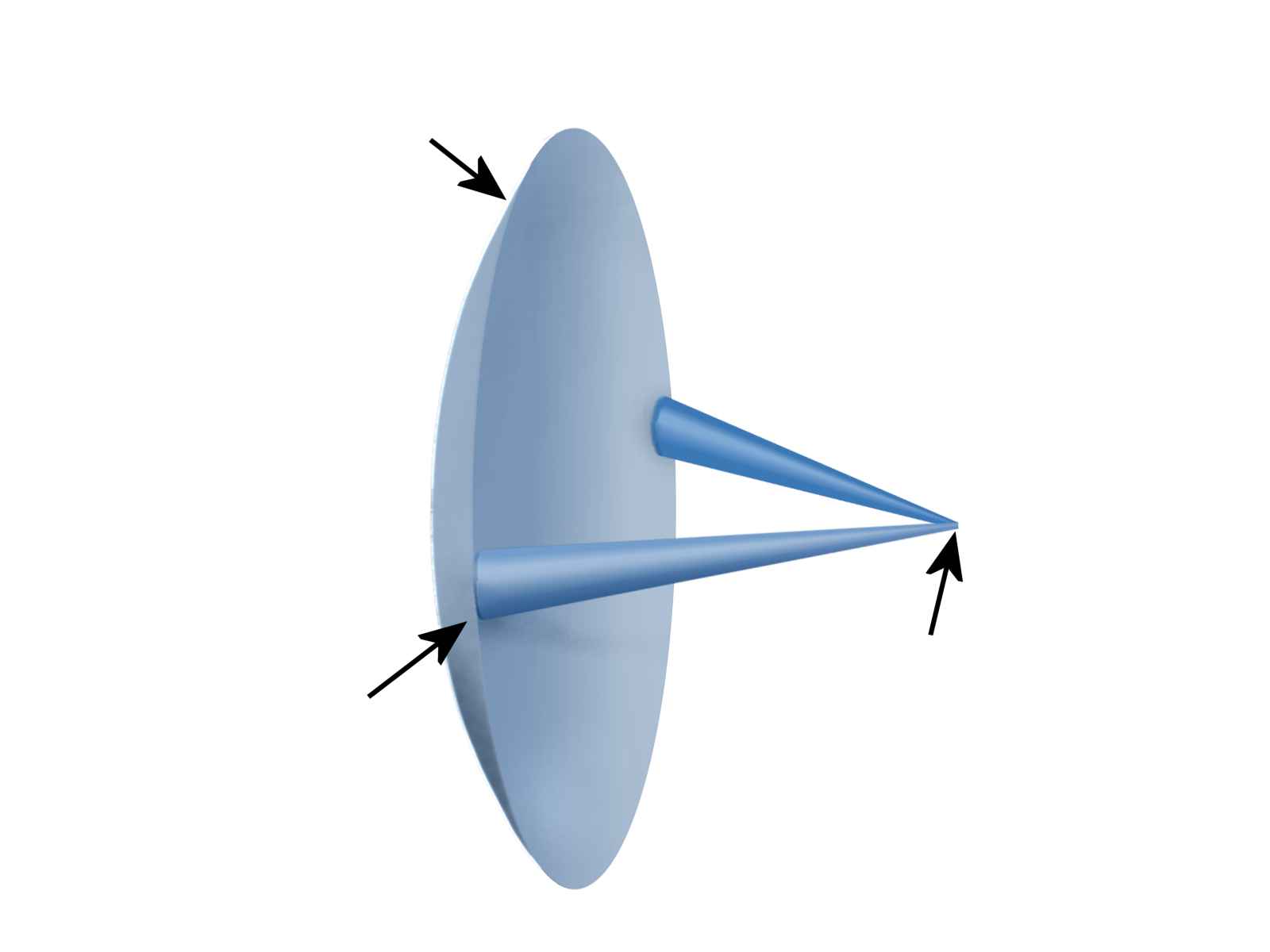
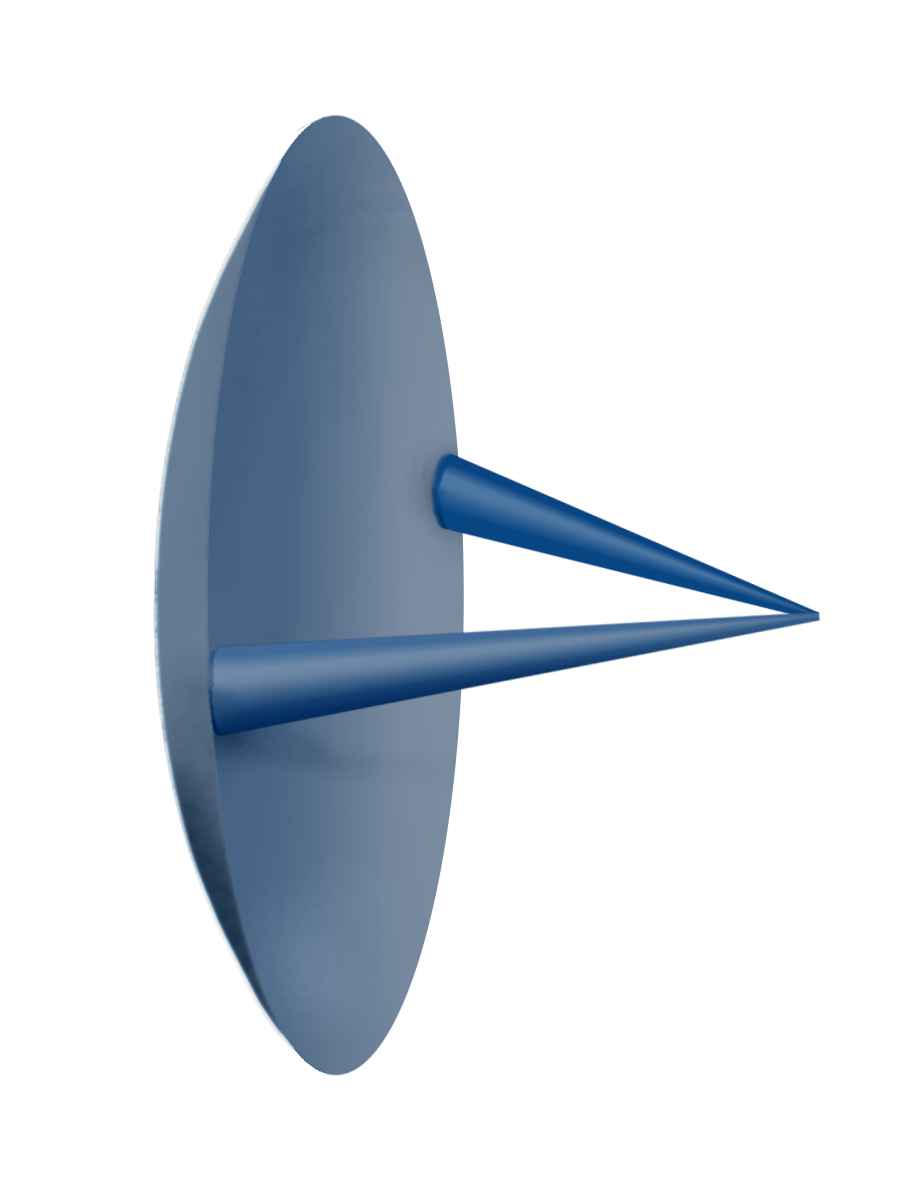
Figure 4 : Structure d’une antenne radiante à impulsion
servant d’éléments
radiants
de l’impulsion
entre l’élément radiant
et le réflecteur
Figure 4 : Structure d’une antenne radiante à impulsion
Antenne radiante à impulsion
Le choix d’une antenne pour un géoradar fonctionnant dans le domaine des fréquences n’est pas très essentiel, elle doit seulement pouvoir émettre sur la gamme des fréquences utilisées. Par contre, pour un radar fonctionnant dans le domaine temporel, le choix est difficile, elle doit avoir le même point focal pour toutes les fréquences utilisées pour ne pas changer la forme de l’impulsion. Par exemple, une antenne log-périodique n’est pas adaptée à cette utilisation. En outre, pour les appareils portables, il faut de petites dimensions géométriques de telle sorte que le dispositif ne devient pas trop lourd.
L’antenne radiante à impulsion a été développée spécifiquement pour les applications à bande de fréquences ultra-large. Elle produit une onde plane dont les différentes fréquences interfèrent pour donner une impulsion à distance du radar. Elle comporte un dipôle, par exemple un cône métallique en avant d’une antenne parabolique. Cela lui donne une bonne directivité et permet une intensité de champ de crête très élevée. En utilisant une antenne de 0,8 mètre, sa bande passant va de 0,2 à 6 GHz. En mettant un revêtement électriquement résistant entre les deux moitiés d’éléments radiants et le réflecteur parabolique, les réflexions d'impulsions de très haute fréquence seront évités sur le radiateur. Comparée à une antenne à cornet avec mode transverse électromagnétique, ce montage est beaucoup plus compact
Utilisations
En géologie, le radar de pénétration de sol sert à cartographier les couches du sous-sol, incluant la roche-mère, le niveau de la nappe phréatique, l’épaisseur du sol arable, les couches sédimentaires et les failles géologiques. L’utilisation de ces radars avec d’autres méthodes géophysiques, comme les essais sismiques, la mesure de résistivité et de conductivité électromagnétique du sol, permet de réduire les incertitudes dans l’évaluation d’un site.
D’autres applications incluent la recherche d’objets enfouis comme des tuyaux d’égout, des tambours, des réservoirs souterrains, des câbles, des rochers, cartographier les dépotoirs et leurs tranchés de ceinture à la recherche de pertes de contaminants. L’archéologie et les services policiers sont également des utilisateurs car les radars à pénétrations de sols permettent de localiser des objets avant de creuser.
Les radars à pénétration de sol sont disponibles en différents formats allant d’appareils qui se tiennent en main à ceux se déplaçant sur un chariot. Les plus petits peuvent être posés sur un mur ou un plancher pour trouver des fissures ou des espaces vides dans des surfaces non métalliques. Les plus gros appareils peuvent être tirés ou poussés le long d’un terrain par un opérateur. La boîte contenant l’antenne et le chariot doivent être fait de matériaux non métalliques pour ne pas interférer avec les émissions.
Il est possible d’utiliser un géoradar dans un véhicule automobile en autant qu’il se trouve dans une nacelle non métallique à l’avant ou à l’arrière de celui-ci. De la même façon, il peut être monté sous un hélicoptère, un avion ou un satellite. La géoradar MARSIS était ainsi une part intégrante de la sonde spatiale Mars Express qui a examiné le sol martien jusqu’à une profondeur de 5 km en utilisant des fréquences de 1, à 5 MHz. La distance entre l’antenne et la planète oscillait entre 300 et 800 km.
Images de radargrammes dans une fouille archéologique avec un géoradar
Une étude de Dean Goodman effectuée au Japon a permit de cartographier en trois dimensions un monticule funéraire avec la chambre mortuaire clairement visible tout en bas (figure 2). La figure 3 montre une coupe en trois dimensions de cette chambre trouvée sur l’île de Kyushu. Elle contenait les restes d’un guerrier ainsi qu’une variété d’artefacts, dont des épées de bronze. (Source des images: Dean Goodmann)

Figure 5 : Modèle ancien de radar à pénétration de sol au travail
{kind=link}
{kind=link}
Figure7 : Coupe en trois dimensions du sol.