Commandes automatique de gain
La plupart des radars utilisent une méthode ou une autre pour empêcher la saturation de leur récepteur lors de l’amplification de la fréquence intermédiaire (FI) en une ou plusieurs étapes. Le contrôle manuel par l’opérateur radar est la plus simple façon de le faire mais elle est très aléatoire et accaparante.
De plus, la variation d’intensité des signaux à traiter par les récepteurs radar est très grande. Les échos près du radar sont beaucoup plus intenses que ceux à grande distance à cause de la diminution en 1/R4 selon l’équation du radar. L’ajustement du gain est donc variable avec la distance et avec les propriétés réflectives des cibles.
| Français | Anglais | Russe (Cyrillique) | Allemand | |
| CPG | Commande principale de gain | main gain control (MGC) |
Ручная Регулировка Усиления (РРУ) |
Handregelung |
| CVT | Gain variable dans le temps | sensitivity time control (STC) |
Временная Автоматическая Регулировка Усиления (ВАРУ) |
zeitabhängige automatische Verstärkungs- regelung (GTC) |
| CAG | Commande automatique de gain | automatic gain control (AGC) |
Шумовая Автоматическая Регулировка Усиления (ШАРУ) |
rauschabhängige Automatische Verstärkungs- Regelung (AVR) |
| ampli- log |
Amplificateur logarithmique |
logarithmic amplifier | logarithmischer Verstärker |
Tableau 1: Différentes méthodes de commande automatique de gain.
Commande principale de gain
L’opérateur peut avoir à sa disposition un bouton d’ajustement manuel, le plus souvent il ne s'agit que d'un potentiomètre qui ajuste au mieux la tension de gain. Cette commande est souvent sous-estimée ou mal utilisée parce qu’elle n'aide pas à augmenter la sensibilité du récepteur seulement à rehausser tous les échos jusqu’à saturation.
L’opérateur ne voit souvent pas plus de cibles car les signaux plus faibles sont perdus dans le bruit. Ce dernier peut même apparaître sur des zones entières d’un affichage PPI. Cette commande doit donc être utilisée de façon optimale ainsi :
- Le contrôle vidéo et de luminosité sur l'unité d'affichage doivent être ramené au minimum ;
- Le bouton de luminosité doit être ajusté jusqu’à ce qu'un écho témoin émis par le système lui-même puisse être juste perçu à l’écran ;
- Le contrôleur vidéo (gain) est ensuite tourné jusqu'à voir le bruit de fond apparaître. Ce dernier devrait être 3dB plus faible que l’écho témoin, soit deux fois moins intense ;
- L’opérateur répètera ces étapes une demi-heure plus tard, après que ses yeux se soient habitués à l'obscurité et puisse mieux comparer les intensités.
Gain variable dans le temps (GVT)
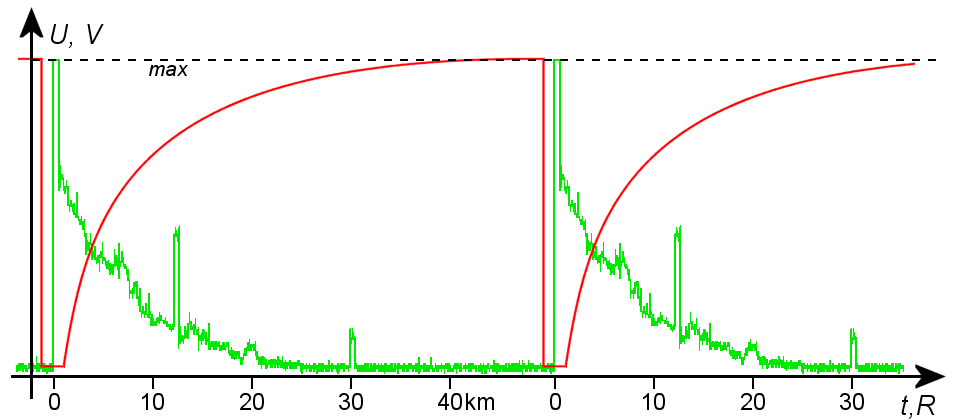
Figure 1 : Diagramme de la méthode de gain variable dans le temps
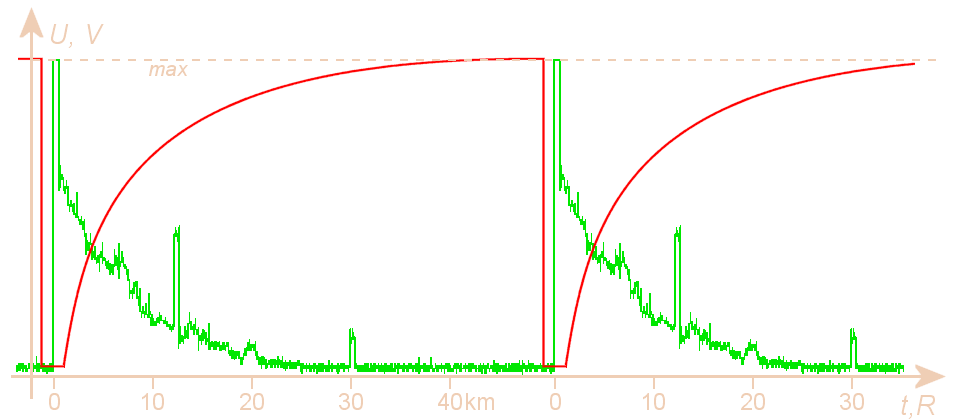
L’application d’un gain uniforme, comme dans la méthode manuelle, n’est pas la meilleure solution à cause de la variabilité des échos. Différentes méthodes furent développées pour effectuer automatiquement ces corrections d’intensité.
Les premiers circuits de contrôle du gain, appelés gain variable dans le temps (GVT), utilisaient la propriété de variation avec la distance, et donc le temps, du signal radar. Ces circuits appliquaient une correction inversement proportionnelle au temps passé entre l’émission et la réception de chaque impulsion reçue dans une période de répétition d’impulsion.
La figure 1 montre en vert la variation avec la distance de l’intensité du faisceau radar avec certains pics correspondants à des échos. Le circuit de gain variable dans le temps applique la courbe inverse en rouge pour normaliser l’intensité des retours. Celle-ci est idéalement en R4 mais cela est difficile à produire. En pratique, c’est la tension de chargement d’un condensateur qui est utilisé, ce qui donne une fonction exponentielle.
Il est à remarquer que le gain appliqué très près du radar est nul. Cette période correspond à la distance aveugle durant laquelle l’impulsion est émise. Durant ce laps de temps, il est toujours possible qu’une partie du très puisant signal émis passe du circuit d’émission vers le récepteur et le gain nul permet d’éviter de griller ce dernier.
En général, le GVT n’est utilisé que pour des distances allant jusqu’à 80 km du radar. Cela évite la saturation du récepteur par de très probables forts échos de retour à l’intérieur de cette distance. Les échos provenant de plus loin ont peu de chance d’être assez forts pour affecter le récepteur et aucune correction ne leur est appliquée.
Commande automatique de gain (CAG)
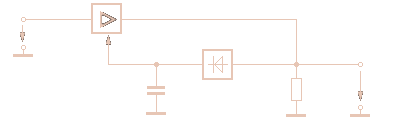
Figure 2 : Schéma de la commande automatique de gain.
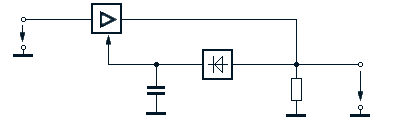
Figure 2 : Schéma de la commande automatique de gain.
Figure 2 : Schéma de la commande automatique de gain.
Contrôler le gain est une nécessité pour obtenir la meilleure réception de signaux variant grandement d’intensité. Une forme complexe de commande automatique de gain (CAG) ou de commande automatique instantanée de gain (CAIG) est utilisée en exploitation normale.
Le CAG est une méthode permettant de contrôler automatiquement le gain dans les étages d'amplification d'un récepteur radio de façon à ce que le signal de sortie demeure relativement insensible aux variations de l'intensité de réception. La plus simple forme de CAG est d’ajuster le biais, et par conséquent le gain, de l’amplificateur selon le niveau des signaux reçus. Ainsi le gain est proportionnel au plus fort signal reçu et si plusieurs signaux entrent simultanément cela amplifiera seulement les plus faibles signaux, souvent ceux avec le plus d’importance pour l’opérateur.
Le CAIG est cependant la méthode plus souvent utilisée de nos jours. Le gain y est ajusté pour chaque signal individuellement. Il est formé d’un amplificateur de courant continu à large bande passante qui varie instantanément le gain appliqué au signal de fréquence intermédiaire mais inversement au changement d’intensité de celui-ci. Ainsi, l’amplification suit une pente inverse à celle de la variation d’intensité des signaux ce qui augmente les faibles échos et diminue les échos forts.
La gamme dynamique d’un CAIG est limitée par le nombre d’étapes d’amplification de la FI. Quand il n’y a qu’une étape, le gain est généralement autour de 20 dB mais il peut atteindre 40 dB pour une série d’amplifications.
Amplificateur logarithmique
Un amplificateur logarithmique est spécialement conçu pour ne pas saturer tout en n’utilisant pas de circuit spécial de contrôle du gain. La tension de sortie de cet amplificateur augmente de façon linéaire pour les faibles signaux d’entrée et devient une asymptote logarithmique quand l’intensité des signaux augmente. Ainsi la tension de sortie n’atteint jamais la valeur de saturation, au contraire des amplificateurs ordinaires de FI.
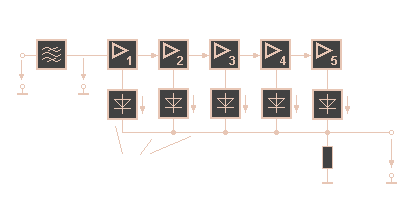
Figure 3 : Schéma fonctionnel d’un amplificateur logarithmique.
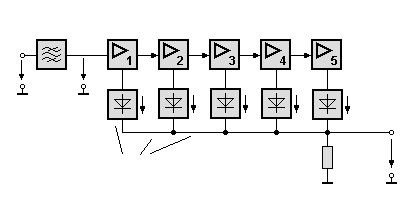
Figure 3 : Schéma fonctionnel d’un amplificateur logarithmique.
Figure 3 : Schéma fonctionnel d’un amplificateur logarithmique.
Un circuit typique pour obtenir un gain logarithmique est montré dans la figure 3. Il s’agit d’une série d’amplificateurs par lesquels passe le signal radar. Ils sont reliés à des diodes et un détecteur (points I) qui peut mesurer la tension à chaque étape d’amplification. La tension de sortie dépend de la somme des tensions venant de ces détecteurs et non de la tension finale des amplificateurs.
Ainsi, la série d’amplificateurs augmente linéairement l’intensité du signal FI ce qui peut mener à la saturation à l’amplificateur final. Cependant, la tension ne sera pas à son maximum aux détecteurs antérieurs. Lorsqu’un signal passant dans la série d’amplificateurs est graduellement rehaussé pour atteindre la saturation du dernier de ceux-ci, la tension en I5 sera à la valeur de saturation. Par contre, celle aux détecteurs antérieurs ne le sera pas. La valeur de sortie du circuit sera la somme de I1 à I5.
Si un autre signal légèrement plus fort passe dans le circuit, la somme des tensions des détecteurs sera légèrement plus forte même si I5 a toujours la même valeur. Plus le signal reçu augmente d’intensité plus d’amplificateurs de la série satureront en ordre décroissant de leur position dans la chaîne. En choisissant soigneusement le nombre d’amplificateurs et leur niveau de saturation, on obtient une réponse approximativement logarithmique et on évite la saturation.
Un défaut de ce circuit est que si deux signaux arrivent en même temps, un faible et un fort, ils se confondent dans le récepteur et le gain sera légèrement réduit pour celui qui est faible à cause de la limitation appliquée au second.
Gain dynamique de balayage
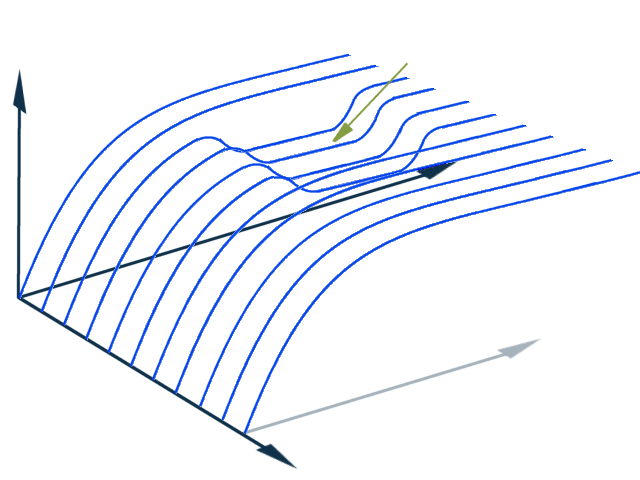
Figure 4 : Diagramme montrant une série de GVT sur différents azimuts.
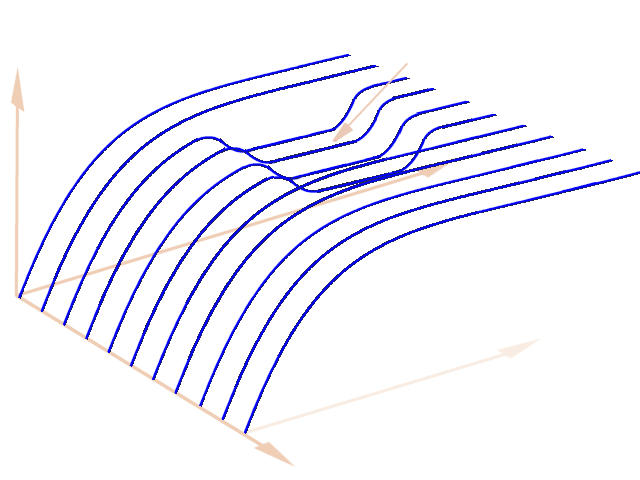
Figure 4 : Diagramme montrant une série de GVT sur différents azimuts.
Il y a toujours des échos permanent, comme des échos de sol venant du relief, qui affecte les données radars. Leur intensité peut être importante mais leur position est connue et le gain peut être ajusté pour en diminuer les effets sur l’affichage radar. Les récepteurs anciens appliquaient un masque pour diminuer le gain à ces endroits mais les caractéristiques de ces échos varient avec les conditions atmosphériques ce qui pouvait mener à une compensation incorrecte. Le récepteurs modernes mesurent l’intensité réelle pour un grand nombre de cellules de résolution durant le balayage et peuvent ainsi ajuster le gain dynamiquement. L’atténuation appliquée ensuite au signal suit généralement une variation par rapport à la valeur statistique du masque fixe.
Cette approche est simple mais comporte un défaut: sur les bords de la zone de fouillis radar, la variation est souvent abrupte avec la zone libre de fouillis. L’analyse de l’intensité par le système a tendance à étaler cette bordure ce qui étend l’atténuation à une certaine distance hors du masque, le tout affectant la visualisation des cibles mobiles dans cette zone. Cela est particulièrement vrai avec les impulsions longues et les impulsions compressées qui ont des cellules de résolution plus larges.
Le gain dynamique de balayage est généralement appliqué à des diodes PIN dont la tension est biaisée pour donner des caractéristiques assez linéaires.