Trajectographie primaire
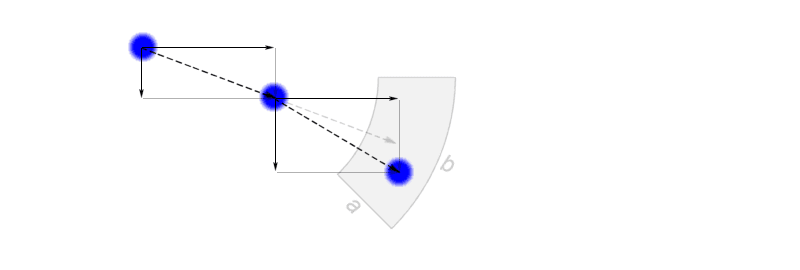
Les informations obtenues sur les cibles par le traitement radar sont envoyées sous forme de pointage des cibles ou des trajectoires de celles-ci. Une trajectoire est formée non seulement de la position des cibles à un moment donné mais également d’informations sur la vitesse et la direction de déplacement de chaque cible, obtenues par le logiciel de poursuite du radar.
de révolution de l’antenne ou de
mise à jour de la trajectoire
(des échos)
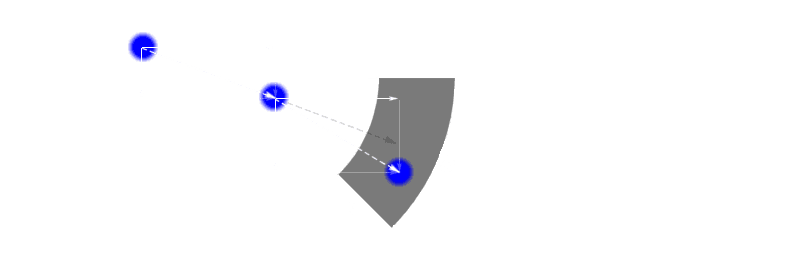
Figure 1 : Trajectoire estimée
de révolution de l’antenne ou de
mise à jour de la trajectoire
(des échos)
Figure 1 : Trajectoire estimée
Ce logiciel essaie de mettre continuellement à jour la trajectoire des cibles en utilisant une moyenne pondérée entre les dernières positions de celle-ci et les trajectoires prévues par leur mouvement antérieur. À chaque nouveau balayage du radar, chaque écho est comparé avec la position prévue des cibles d’après les balayages antérieures, selon certaines conditions de tolérances d’erreur. Les échos que le programme ne peut associer avec une trajectoire antérieure peuvent être alors considérés comme de nouvelles cibles.
La trajectographie est particulièrement difficile à faire dans le cas de cibles au mouvement erratique, en présence d’échos parasites non uniformément distribués (échos de sol, brouillage électronique, etc.), lorsque des échos ont été éliminés antérieurement par le filtrage ou de faux échos ont réussis à le traverser. Le logiciel de poursuite utilise une série d’algorithmes mathématiques sophistiqués pour résoudre ce genre de problèmes. Parce que le traitement doit se faire avec un minimum de délais avec le temps actuel, et souvent avec plusieurs centaines de cibles en même temps, il est limité par la puissance des ordinateurs disponibles.
La mise à jour de la trajectoire des cibles à partir des échos au temps présent et leur trajectoire prévue peut se faire de différentes façons :
- En définissant une « zone d’erreur » de chaque côté de la position prévue d’une cible,
le programme peut déterminer que la cible est relié à :
- L’écho qui se trouve dans le plus près de la position prévue dans la zone ;
- L’écho le plus intense qui se trouve dans la zone.
- En utilisant une approche statistique, le programme détermine quel écho a le plus de chances de correspondre à la position prévue parmi un ensemble d’échos dans le secteur. Cette méthode est particulièrement bonne dans les situations de forts échos parasites.
Une fois qu’un écho au temps présent est associé à une trajectoire, les données sont passées à l’étape du lissage de trajectoire où la suite temporelle des échos reliés à chaque trajectoire est ré-analysée pour éliminer les variations trop brusques de la trajectoire causées par les défauts de l’analyse primaire.
Après ce processus, un certain nombre d’échos ne peuvent être associés à une trajectoire connue et deviennent donc de nouvelles cibles. Ils seront gardés en mémoire pour l’initialisation de nouvelles trajectoires à un temps subséquent. Il peut arriver aussi qu’aucun écho ne correspondent à une trajectoire prévue ce qui mène au processus de décision de cessation de la poursuite.