La détection d'hélicoptères
Avec les radars analogiques, il était presque impossible de distinguer un hélicoptère en vol stationnaire d'une cible fixe. Seulement avec beaucoup d'expérience, un opérateur radar peut-il différencier cette cible des échos de sol dont il connait les positions.
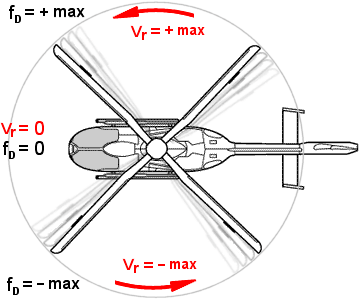
Figure 1 : Vitesse relative des pales d'un hélicoptère
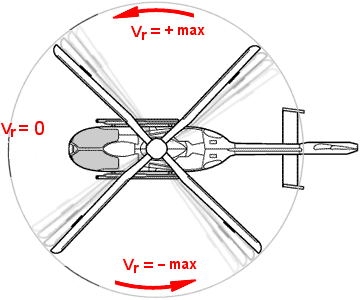
Figure 1 : Vitesse relative des pales d'un hélicoptère
Qu’est-ce qui distingue un hélicoptère en vol stationnaire d'une autre cible fixe? Hé bien, le rotor tourne. Dans l’image, un hélicoptère du type de l'ADAC Christopher est vu d’un point situé au-dessus de lui. Il a quatre pales qui tournent en sens antihoraire. L'hélicoptère n'a en soi aucune fréquence Doppler, car sa vitesse radiale est nulle, mais les pales se déplacent à une vitesse très élevée.
Supposons que le radar se trouve à gauche de l’image. Dans la partie supérieure de l’image, les pales se dirigent vers le radar, ce qui donne une vitesse radiale vers le radar. Dans la partie inférieure, les pales s'éloignent du radar et ont donc une vitesse radiale négative. La composante radiale de chacune des pales varie avec l’angle par rapport au radar ce qui donne un signal total ayant un décalage Doppler composé des décalages des quatre pales. Pendant qu’une pale est à la partie supérieure de la rotation et a une composante maximale vers le radar, celle du bas se trouve à la position opposée et s’éloigne du radar de façon maximale. Les deux autres ont une composante nulle car leur mouvement est perpendiculaire à l’axe radar-hélicoptère et ne contribuent pas.
Ainsi le mouvement de l'hélicoptère étant nul, il ne donne pas en théorie de décalage Doppler (fD) à l’écho radar. Cependant, le mouvement des pales donnera un décalage de fréquences Doppler très élevée. Donc le signal retourné comportera deux caractéristiques:
- Un très fort pic de réflectivité ayant :
freçue = fenvoyée
- Un autre pic de réflectivité ayant une vitesse presque supersonique :
| fD = | 600 m/s |
| λ |
Les systèmes plus anciens de visualisation des cibles mobiles avaient des problèmes avec le fait que les rotors pouvaient à la fois s’éloigner et se rapprocher avec la même vitesse radiale vr du radar, selon leur position dans la rotation. Une troisième caractéristique est donc recherchée :
- Il existe deux pics secondaires opposés en fréquence:
freçue = fenvoyée ± fDoppler
Ces deux fréquences Doppler ne sont égales que si l’appareil est parfaitement immobile. S’il bouge légèrement, la différence des fréquences Doppler donne la vitesse radiale de l'hélicoptère. C’est la transformée de Fourier rapide du signal qui permet de faire l’analyse des fréquences. Les systèmes très sensibles peuvent même reconnaître le taux de variation du décalage Doppler et combien il y a de pales au rotor de l'hélicoptère, pour déterminer s’il s'agit d'un hélicoptère lourd ou léger.