Série de filtres Doppler
échos parasites
vitesse nulle
de bandes
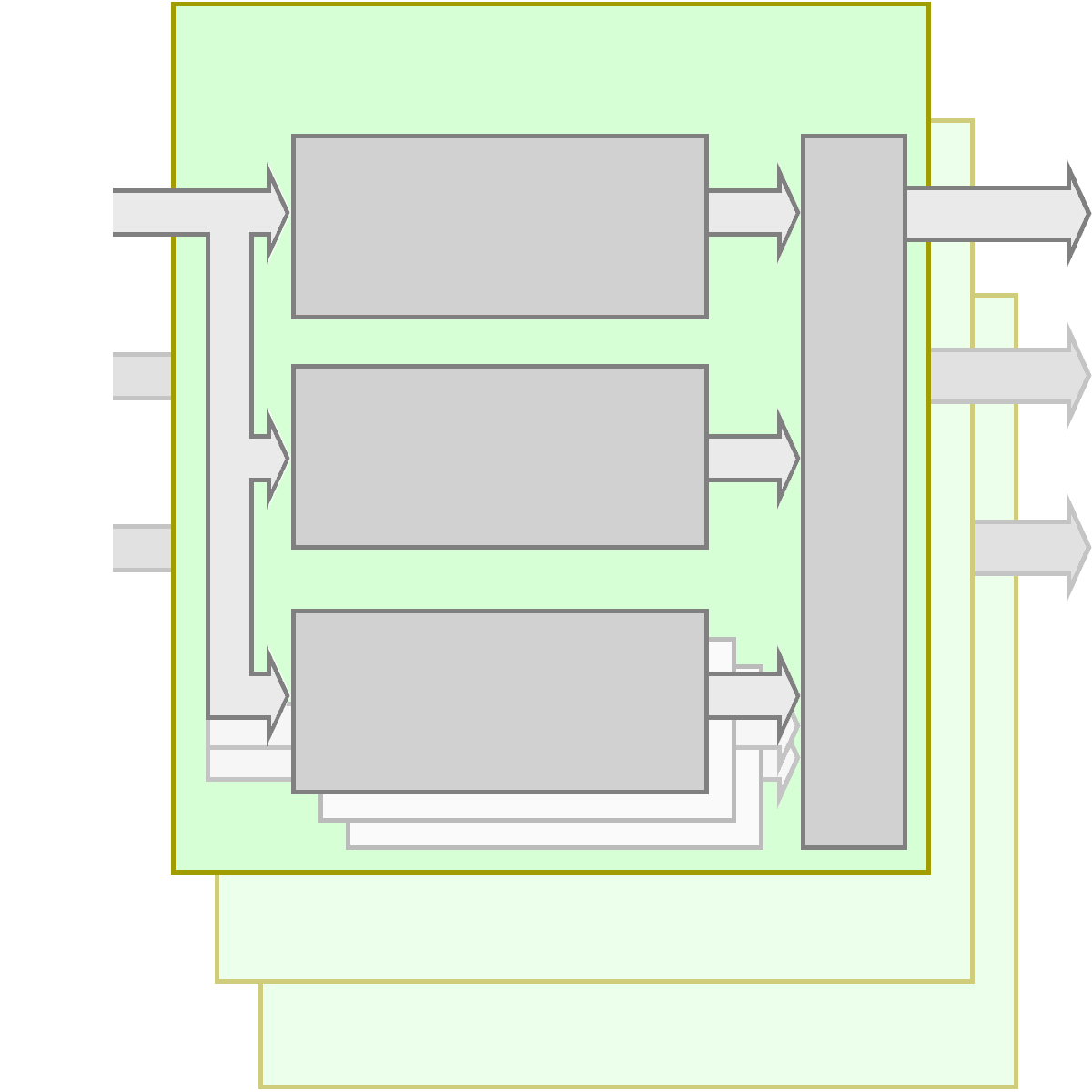
Figure 1 : Schéma d’un system de visualisation des cibles mobiles pour un radar mono-impulsion avec une récepteur numérique.
échos parasites
vitesse nulle
de bandes
Figure 1 : Schéma d’un system de visualisation des cibles mobiles pour un radar mono-impulsion avec une récepteur numérique.
Figure 1 : Schéma d’un system de visualisation des cibles mobiles pour un radar mono-impulsion avec une récepteur numérique. (Image interactive)
Série de filtres Doppler
Un détecteur de cibles mobiles fonctionnant avec les données d’un radar cohérent à mono-impulsion nécessite une série de filtres Doppler. Les composantes en phase et en quadrature (I et Q) du signal, provenant du détecteur de phase, passent par un convertisseur analogue/numérique et alimentent soit un circuit de transformée rapide de Fourier, soit une série de filtres parallèles. Le résultat est ensuite pondéré par l’intensité versus la fréquence pour éliminer les harmoniques des lobes secondaires. Ensuite, l’amplitude de chaque gamme spectrale est calculée. La visualisation de cible mobile (VCM) se fait en parallèle sur les trois voies de données (Σ, ΔAz and ΔEl) disponibles.
Dans ce cas, la synchronisation avec un COHO, comme c’est le cas avec un radar pseudo-cohérent, n’est pas nécessaire car les impulsions sont cohérentes et donc identiques à l’émission l’une par rapport à la suivante.
Tous les filtres de la figure 1 sont similaires mais n’utilisent pas nécessairement les mêmes données. Le filtre Doppler des échos parasites fonctionne selon la méthode des paires d’impulsions: un écho parasite est éliminé grâce à une comparaison du déphasage sur des échos successifs revenant d’une cible sur au moins deux échos consécutifs. Toutes les cibles ayant une vitesse non négligeable peuvent passer ce filtre. Le filtre Doppler de vitesse nulle est un filtre passe-bas sur le décalage de fréquence Doppler dont le seuil est ajustable. Les filtres Doppler de bandes fonctionnent avec le décalage Doppler et divisent la plage de décalage en sections correspondant à des vitesses caractéristiques de cibles. Le traitement des trois filtres Doppler demande beaucoup de temps numérique afin de réduire également l’influence de la « vitesse aveugle ».
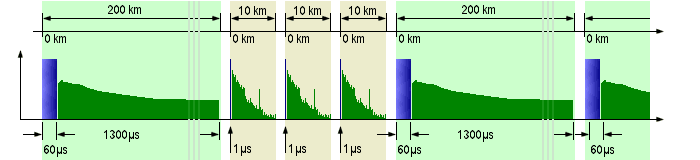
Figure 2 : Diagramme temporel d’une série de trois impulsions de courte portée et une de longue portée, la VCM se faisant sur les trois courtes.
portée
portée
portée
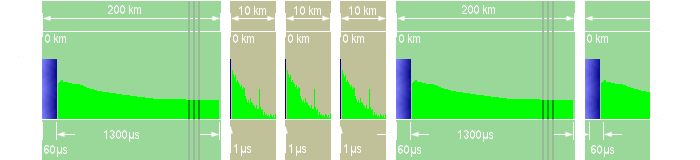
Figure 2 : Diagramme temporel d’une série de trois impulsions de courte portée et une de longue portée, la VCM se faisant sur les trois courtes.
portée
portée
portée
Figure 2 : Diagramme temporel d’une série de trois impulsions de courte portée et une de longue portée, la VCM se faisant sur les trois courtes.
Série de filtres Doppler
Le principe de base de tout système utilisant la fréquence Doppler comme filtre est de séparer les cibles selon la zone de fréquence associée à leur vitesse probable. Il peut comporter plusieurs filtres, chacun chargé de repérer un type de cibles particulier, selon le seuil choisi de fréquences. Le spectre de fréquences Doppler est donc divisé en N bandes qui permettent de mieux repérer les cibles par type de cibles probables dans la couverture radar: échos de sol, artéfacts, cibles sans intérêts et cibles d’intérêt.
Les échos de sol ont une vitesse nulle et l’utilisation d’un seuil de fD = Δφ = 0 permet de les filtrer. Par contre, certains échos parasites pour l’aviation ont une vitesse propre, comme les précipitations et les oiseaux, il suffit de hausser le seuil des filtres pour les éliminer.
_tp2.png)
Figure 3 : Caractéristique de la fréquence Doppler qui permet d’ajuster un filtre passe-bas Doppler.
Figure 3 : Caractéristique de la fréquence Doppler qui permet d’ajuster un filtre passe-bas Doppler.
Filtre passe-bas Doppler
Les échos de sol sont essentiellement filtrés par le filtre de vitesse Doppler nulle qui peut être vu comme un filtre passe-bas. Le nom est un peu trompeur car il n’enlève pas seulement les échos ayant une vitesse nulle, puisqu’une certaine erreur existe quand à la vitesse notée d’un écho, mais ceux ayant une vitesse très faible (ex. 20 nœuds).
Le seuil suivant agit sur une bande de fréquence reliée aux objets et phénomènes sans intérêt pour l’opérateur radar. Par exemple, le seuil de 40 nœuds est utilisé pour éliminer les oiseaux, les précipitations et les paillettes de contre-mesure en aviation.
_fb.png)
Figure 4 : Réponse en fréquences pour une série de filtres Doppler pour un cas avec N=8.
Figure 4 : Réponse en fréquences pour une série de filtres Doppler pour un cas avec N=8.
Filtres Doppler de bandes
Plus l’écran se couvre d’échos indésirables, plus le seuil du filtre doit être rehaussé ce qui permet de restreindre les échos qui resteront à l’écran. Chacun des filtres travaille ainsi comme une intégration cohérente de toutes les fréquences dans la zone choisie.
La figure 4 montre un cas où le spectre est divisé en 8 gammes de fréquences, représentant 8 gammes de vitesses que l’opérateur peut éliminer en rehaussant le seuil du filtre.