Visualisation à défilement (Filtre Doppler du fouillis 2)
Une autre méthode pour éliminer les échos fixes du fouillis radar est appelée Visualisation à défilement 1. Cette méthode consiste de mettre en mémoire deux périodes complètes d’impulsions brutes revenant de la cible et de les comparer à une troisième.
en sinus
et cosinus
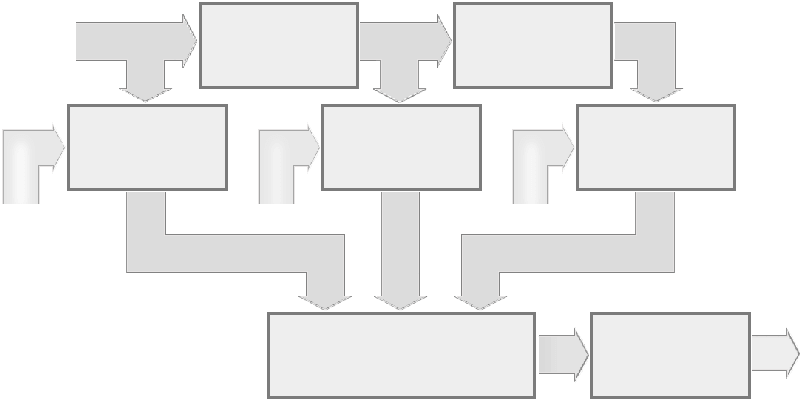
Figure 1 : Diagramme de fonctionnement d’un filtre Doppler utilisant la Visualisation à défilement
en sinus
et cosinus
Figure 1 : Diagramme de fonctionnement d’un filtre Doppler utilisant la Visualisation à défilement
en sinus
et cosinus
Figure 1 : Diagramme de fonctionnement d’un filtre Doppler utilisant la Visualisation à défilement (Image interactive)
Durant la troisième période, toutes les données sont pondérées et normalisées. La pondération est faites de la même façon que pour l’algorithme « Ajouter et jeter », c’est-à-dire que les données de la première et de la dernière période sont multipliées par 0,5 et que celle de la seconde le sont par –1. Les échos ayant les mêmes amplitudes et phases donnent une somme de zéro alors que ceux bougeant donneront une valeur non nulle.
Encore une fois, la somme donne une valeur ayant plus de bits que ceux des signaux originaux et doit être tronquée. Souvent, seulement le bit le plus petit sera enlevé mais ceci a le désavantage de rendre les faibles échos encore plus faibles. Quelques fois, un algorithme plus complexe est utilisé remédier à ce problème.
La différence entre cette méthode et celle de « Ajouter et jeter » est qu’elle est indépendante du nombre d’impulsions dans la série d’impulsions (PRI), une seule sortie en résulte. Le nombre d’impulsions utilisées est limité par le circuit : N périodes d’impulsions de Visualisation des cibles mobiles donne N-2 résultats. Cette technique est principalement utilisée par les radars qui nécessitent un plus grand nombre de coups au but par balayage pour l’intégration des impulsions.
Composantes en sinus et cosinus
Les signaux numériques d’entrée représentent la partie réelle (sinus) et celle imaginaire (cosinus) de l’écho. Les deux composantes sont traitées séparément.
Multiplication pondérée
Les échos d’une série de périodes d’impulsions sont multipliés chacun par un coefficient de pondération afin de donner une somme nulle s’il s’agit d’un écho fixe.
Pondération
Dans l’exemple donné, la pondération est :
pour la première période d’impulsions de +0,5
pour la seconde de - 1
pour la troisième de +0,5
Mémoire
La mémoire enregistre la première période d’impulsions en valeur binaire complète.
Souvent, il s’agit de mémoires en série (premier bit entré, premier bit sorti), avec une cellule de mémoire par cellule de résolution en portée.
Sommateur
Le sommateur additionne les trois séries impulsions pondérées à la réception de la troisième.
La cible fixe donne une somme nulle alors que les cibles mobiles donnent un résultat variable.
Troncature
Le signal de sortie est un peu plus grand en nombre de bits que chacun des signaux
à cause de la suite de calculs (transport de bits) et doit être tronqué. Habituellement cela est fait en coupant le bit le moins significatif,
ne laissant que le nombre de bit similaire aux signaux originaux. Il existe cependant d’autres algorithmes de troncation plus complexes.
¹) Ne pas confondre avec la technique de la Fenêtre glissante dans l’extracteur d’échos.