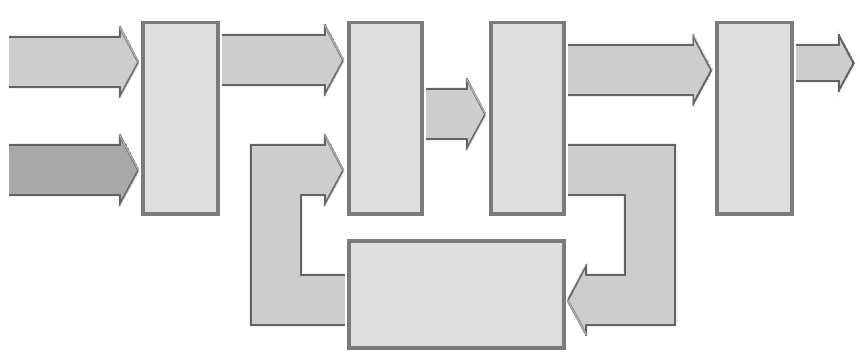
Filtre Doppler du fouillis
Les composantes en sinus et cosinus (I & Q) du décodeur de phase analogue à numérique des impulsions de retour sont envoyées à un analyseur arithmétique. Ces données sont multipliées par des coefficients de pondération et ajoutées à une mémoire préalablement remise à zéro.
La première sortie du sommateur est seulement la donnée d’entrée provenant de l’impulsion du premier balayage. Le second balayage sera ajouté au premier dans la mémoire du processeur (donnant un résultat intermédiaire). Le contenu de la mémoire est ajouté à une troisième impulsion. En choisissant bien la pondération des membres de la somme, le signal provenant de fouillis de trois balayages consécutifs donne une valeur nulle. Les signaux de cibles mobiles, avec leur décalage Doppler, vont cependant donner une valeur non nulle.
en sinus (ou
en cosinus)
du filtre
Doppler
logique
Figure 1 : Diagramme de fonctionnement d’un filtre Doppler de fouillis radar dans un récepteur numérique et utilisant un algorithme de type « Ajouter et jeter »
(ou en cosinus)
du filtre
Doppler
logique
Figure 1 : Diagramme de fonctionnement d’un filtre Doppler de fouillis radar dans un récepteur numérique et utilisant un algorithme de type « Ajouter et jeter »
du filtre
Doppler
logique
Figure 1 : Diagramme de fonctionnement d’un filtre Doppler de fouillis radar dans un récepteur numérique et utilisant un algorithme de type « Ajouter et jeter » (Image interactive)
Un filtre Doppler de fouillis radar de type « Ajouter et jeter » s’utilise le plus souvent avec trois impulsions consécutives, mais peut en compter plus. Dans tous les cas, la logique est la même, seul le logiciel doit être ajusté ainsi que la pondération des impulsions.
Description des modules dans le diagramme
La figure 2 montre le processus avec trois impulsions pour éliminer une cible fixe. La phase et l’amplitude des échos sera toujours la même dans ce cas. Dès lors, les sorties en sinus et cosinus (I & Q) sont approximativement les mêmes (la variation provenant de l’erreur de mesure). La sortie après 3 impulsions est nulle en utilisant la pondération dans l’image : a - 2·a + a = 0. Le décalage Doppler est donc supprimé.
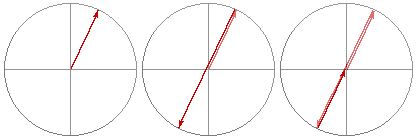
pondération = 1
pondération = -2
pondération = 1
Figure 2 : Traitement des vecteurs I et Q pour une cible fixe
pondération = 1
pondération = -2
pondération = 1
Figure 2 : Traitement des vecteurs I et Q pour une cible fixe
Dans la figure 3, l’amplitude et la phase varient d’un balayage à l’autre à l’autre. La somme pondérée de trois données consécutives avec les mêmes pondérations donnent le vecteur en vert à la sortie du filtre Doppler.
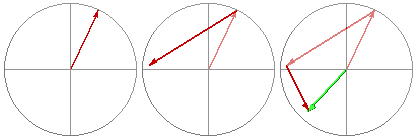
pondération = 1
pondération = -2
pondération = 1
Figure 3 : Traitement des vecteurs d’une cible mobile donnant le vecteur en vert à la sortie du filtre Doppler
pondération = 1
pondération = -2
pondération = 1
Figure 3 : Traitement des vecteurs d’une cible mobile donnant le vecteur en vert à la sortie du filtre Doppler