Ambiguïté distance
Figure 1 : Un écho de second balayage à la distance réelle de 400 km.
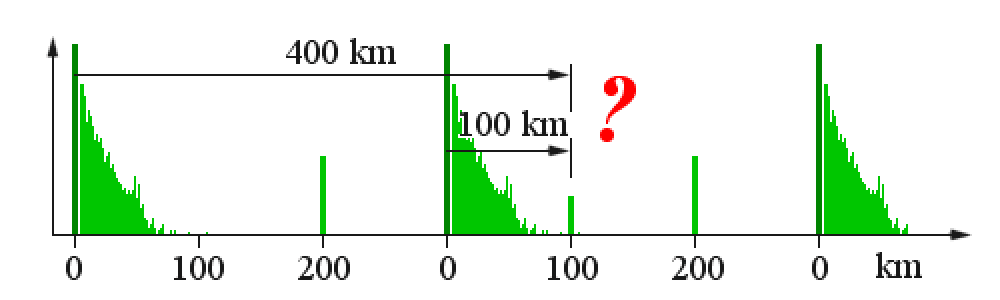
Figure 1 : Un écho de second balayage à la distance réelle de 400 km.
Ambiguïté distance
La distance maximum Rmax mesurable par un radar n'est pas seulement limitée par le résultat de l'équation du radar, mais aussi par la durée du temps qui sépare l'émission de deux impulsions consécutives.
L'horloge du radar est remise à zéro à chaque fois qu'une nouvelle implusion est émise (T0), et ce afin de s'assurer que la mesure de distance s'effectue bien à partir de la dernière impulsion. Les échos reçus dans un délai supérieur à la période de répétition des impulsions (PRI) subissent l'un des deux traitements suivants:
- S'ils arrivent pendant le temps d'émission d'une impulsion, ils sont rejetés (accès impossible aux circuits de réception)
- S'ils sont reçus pendant l'intervalle entre 2 impusions, alors ils génèrent des erreurs de calcul de la distance (échos de nième balayage).
Formule de la distance maximum sans ambiguité:
.print.png)
.png)
(1)
- Rmax = distance maximum sans ambiguité [m]
- c0 = vitesse de la lumière [3·108 m/s]
- T = période de répétition des impulsions (PRI) [s]
- τ = durée d'impulsion [s]
L'insertion de la durée d'impulsion (τ) dans cette formule traduit le fait que l'impulsion reçue par le radar (écho) doit être complète.
La distance maximum sans ambiguïté pour un radar donné peut être déterminee par la formule ci-contre.
Figure 2 : Un écho de deuxième balayage n'a plus de position stable sur l’écran lorsque la PRI est multiple (staggered en anglais).
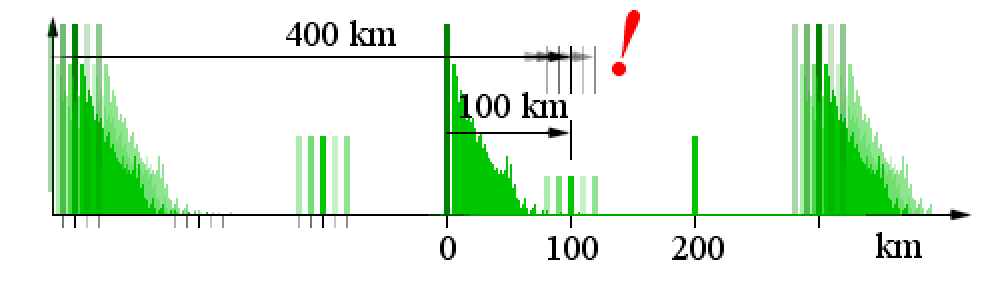
Figure 2 : Un écho de deuxième balayage n'a plus de position stable sur l’écran lorsque la PRI est multiple (staggered en anglais).
Figure 2 : Un écho de deuxième balayage n'a plus de position stable sur l’écran lorsque la PRI est multiple (staggered en anglais).
La période de répétition des impulsions (PRI) du radar est un paramètre important dans le calcul de la distance maximum de détection car les échos qui reviennent au radar après un temps supérieur à la PRI apparaissent sur le scope à des positions erronées (distances fausses). Ils sont alors appelés échos de 2ème balayage (ou de nième balayage).
La fréquence de répétition des impulsions (FRI = 1/PRI) détermine la distance maximum pouvant être visualisée. Les échos revenant au radar au delà de la PRI se traduisent par une „ambiguïté distance” (erreur de visualisation) alors que ceux qui reviennent dans un délais inférieur à la PRI sont affichés à la distance correcte (non ambiguë).
En utilisant une PRI qui n’est pas toujours la même, dite décalée (« staggered » en anglais), l'écho n'est plus visualisé sous la forme d'un petit arc de cercle. Cette visualisation « ambiguë » apparaît comme un amas de points puisque le temps de réception change entre chaque impulsion émise (la distance ambiguë calculée est alors légèrement différente d'une impulsion à l'autre). Grâce à cette particularité, un traitement du signal informatisé peut calculer la distance correcte.
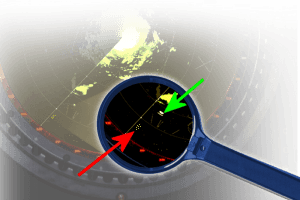
Figure 3 : Un écho de deuxième balayage n'a plus de position stable sur l’écran lorsque la PRI est multiple (staggered en anglais).

Figure 3 : Un écho de deuxième balayage n'a plus de position stable sur l’écran lorsque la PRI est multiple (staggered en anglais).
Figure 3 : Un écho de deuxième balayage n'a plus de position stable sur l’écran lorsque la PRI est multiple (staggered en anglais).
Les radars 3D plus récents utilisant des antennes à réseau de phases (tels le RRP-117) n'ont pas ce problème d'ambiguïté distance. Le calculateur du système détermine une direction de pointage (et une distance de détection) propre à chaque faisceau selon un programme établi.
La figure 3 montre un écho normal et sa réponse IFF, ainsi qu'une réponse IFF de deuxième balayage, sur un scope de type PPI et en utilisant une PRI avec stagger. On remarque également que l'interrogateur n'utilise pas toutes les impulsions de synchronisation. (L'apparition de trop nombreux IFF „ambiguës” peut être contrôlée par la limitation de la puissance d'émission de l'interrogateur.)