Radars à ondes entretenues (ou ondes continues) (CW)
contient des informations
sur l'objet réfléchissant
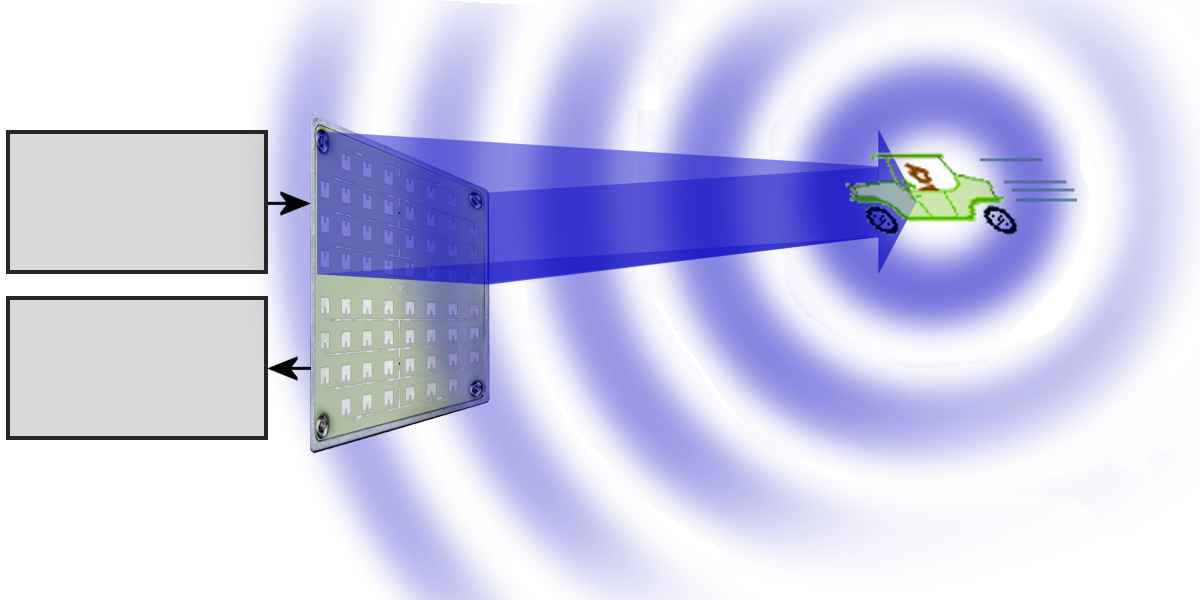
Figure 1 : Radar à ondes entretenues utilise deux antennes souvent
contient des informations
sur l'objet réfléchissant
Figure 1 : Radar à ondes entretenues utilise deux antennes souvent
Radars à ondes entretenues (ou ondes continues) (CW)
Les radars à ondes entretenues (CW) émettent sans interruption un signal hyperfréquence. L'écho est donc reçu et traité continuellement. Ce principe impose de résoudre les deux problèmes suivants:
- empêcher l'énergie émise de passer directement de l'émetteur au récepteur (couplage par signal direct),
- créer des repères temporels sur les échos reçus afin de pouvoir mesurer des durées (donc des distances).
Le passage direct de l'énergie émise vers le récepteur peut être évité par :
- écart physique entre les antennes d'émission et de réception, par exemple en illuminant une cible à l'aide d'un puissant émetteur alors que le récepteur se trouve dans le missile volant vers la cible;
- écart en fréquence du fait du décalage Doppler lorsque l'on mesure des vitesses.
La capacité de mesurer une durée n'est pas nécessaire pour les radars routiers, la distance à laquelle se trouve un véhicule en excès de vitesse étant sans importance. Lorsque l'on a besoin d'une information de distance, on peut alors utiliser une modulation de la fréquence ou un codage de la phase du signal émis.
Un radar CW émettant un signal continu non modulé ne peut mesurer que la vitesse d'une cible, par l'utilisation de l'effet Doppler. Il ne peut ni mesurer de distance, ni discerner deux cibles illuminées simultanément.
Le retour d’écho au radar est preuve d’un obstacle dans la ligne de propagation de l’onde électromagnétique. Certaines caractéristiques de l’obstacle influencent celles de l’écho. Certaines agissent de concert et par exemple, l’intensité de l’écho dépend de la grosseur de l’obstacle, de ses propriétés réflectives et de sa distance au radar, mais il est impossible de déterminer quelle est l’influence de l’un ou l’autre sur le signal puisqu’on ne peut obtenir la distance avec une onde entretenue.
Par contre, le spectre de fréquence est une caractéristique plus spécifique. Ainsi, la réflexion de certains matériaux peut donner à l’écho des harmoniques de la fréquence porteuse qui peuvent alors être utilisés par des radars dits « à harmonique ». Cette propriété se retrouve par exemple dans les vêtements et les bottes; une personne ensevelie dans la neige d’une avalanche peut être retrouvée avec un tel radar. Cependant, c’est l’utilisation du décalage de l’effet Doppler-Fizeau qui est le plus souvent utilisé avec un radar à ondes entretenues.
Radar Doppler
Un radar à ondes entretenues non modulées émet une seule fréquence à amplitude constante. L’écho est soit exactement à la même fréquence pour une cible immobile, soit à une fréquence décalée si cette dernière se déplace. Dans les deux cas, la différence entre la fréquence émise et reçue est appelée le décalage Doppler et permet de trouver la vitesse radiale de déplacement de la cible par rapport au radar. Ce type de radar est appelé radar Doppler car il utilise l’effet Doppler-Fizeau. Il n’y a aucune mesure du temps aller-retour de l’onde puisque l’onde est émise en continue et on ne peut donc obtenir la distance de la cible.
Si l’utilisateur veut cette distance, il faut que le signal soit modulé en fréquence ou en amplitude. En effet, lorsque l’onde est produite par l’émetteur à une fréquence ou à une amplitude qui varie dans le temps, il est possible de noter le temps aller-retour qui correspond à une fréquence ou à une amplitude donnée. En modulant ainsi le signal radar, nous introduisons un autre type de radar aux principes différents de mesure. Par exemple, la modulation en fréquence donne le radar à onde continue modulée fréquence ou FMCW. La modulation en amplitude du signal, jusqu’à 100 %, donne un autre type.
radiofréquences
puissance
radiofréquences
audio
(Processeur audio)
transmission
réception
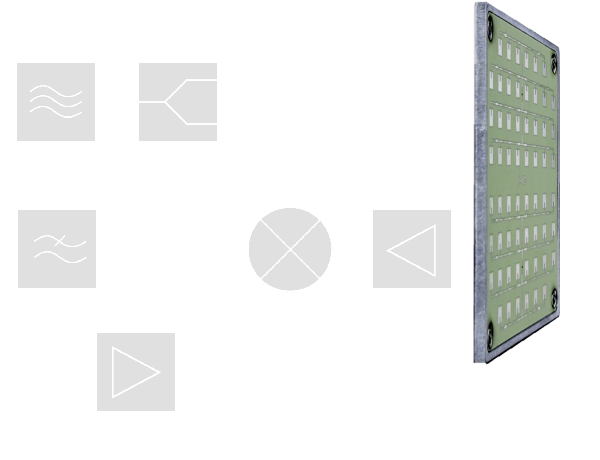
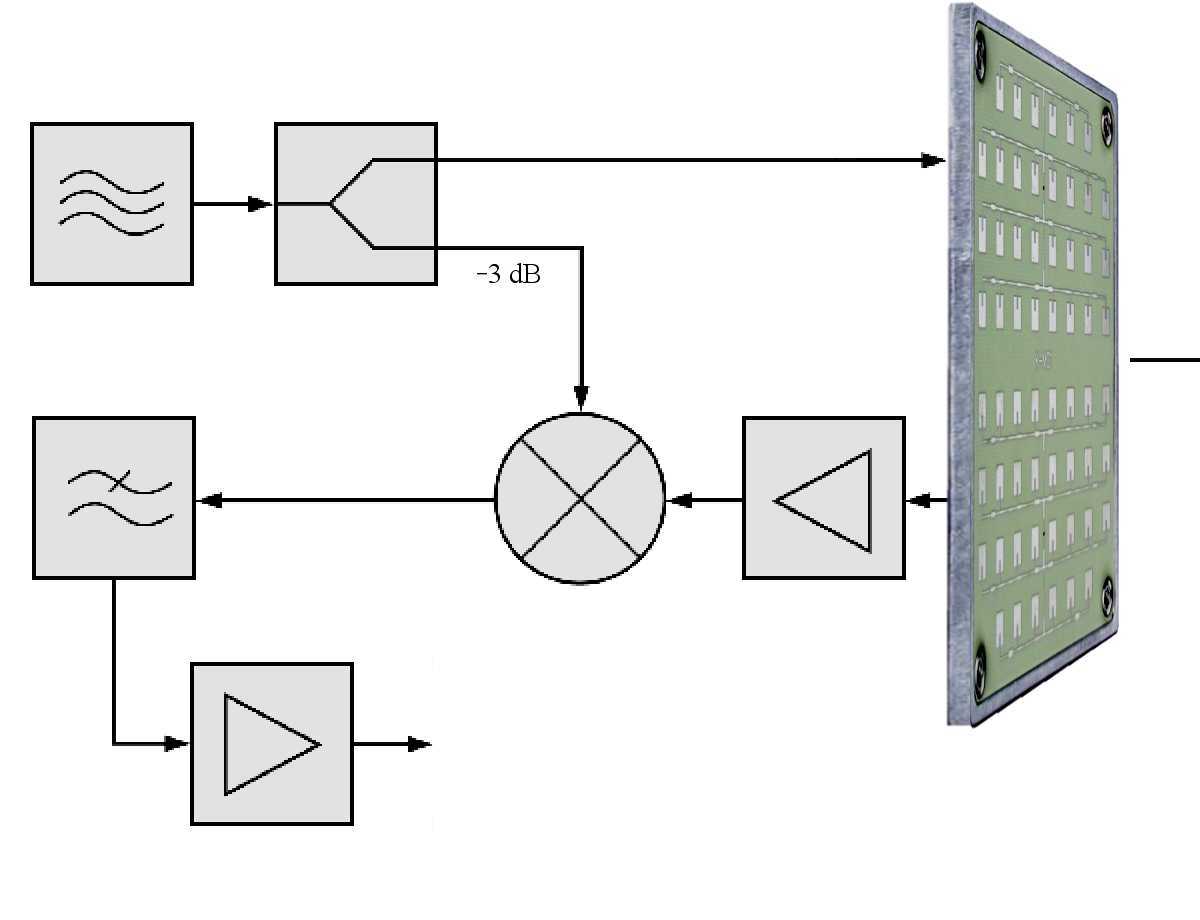
Figure 2 : Diagramme d’un radar à onde entretenue avec transmetteur/récepteur utilisant un abaissement direct de la fréquence
radiofréquences
puissance
radiofréquences
audio
(Processeur audio)
transmission
réception
Figure 2 : Diagramme d’un radar à onde entretenue avec transmetteur/récepteur utilisant un abaissement direct de la fréquence
radiofréquences
puissance
radiofréquences
audio
(Processeur audio)
transmission
réception
Figure 2 : Diagramme d’un radar à onde entretenue avec transmetteur/récepteur utilisant un abaissement direct de la fréquence (Image interactive)
Diagramme d'un radar à ondes entretenues
Direct conversion receiver
La structure d’un radar Doppler est simple.
Les circuits du transmetteur et du récepteur peuvent être chacun un circuit imprimé à semi-conducteurs sur un seul substrat.
Ce circuit transmetteur-récepteur est appelé en anglais transceiver.
En général, il est fourni avec les deux antennes nécessaires.
La plupart du temps ce sera une antenne patch sur circuit imprimé à double côté ou,
pour une plus grande largeur de bande de fréquences, de petites antennes à cornet.
Dans le récepteur à conversion directe (dit homodyne), l’écho n’est pas converti à une fréquence intermédiaire mais la haute fréquence de transmission est utilisée pour effectuer un baissement de la fréquence. Le mélangeur travaille ainsi dans la fréquence de base et ne subit pas d’interférence avec la fréquence porteuse. Pour effectuer la conversion de l’écho, le mélangeur a besoin d’un oscillateur local ayant typiquement une puissance de 7 dBm avec un générateur de radiofréquences de 10 dBm. Comme le diviseur de puissance a une atténuation minimale de -3 dB, le signal transmis fourni au mélangeur a au moins 6 dBm.
Même si le signal est à la fréquence de base, la sortie est souvent dite erronément à la fréquence intermédiaire. Le décalage Doppler se trouve alors dans le spectre des fréquences audibles. Les échos forts sans mouvement apparaissent dans cette sortie comme une tension constante s’ils ne sont pas bloqués par des condensateurs faisant office de filtre passe-haut (ceux-ci sont utilisés pour prévenir le passage du signal fort émis dans le récepteur très sensible). La formule suivante permet de calculer la vitesse Doppler selon le décalage:
| fD = | 2·v | fD = Décalage Doppler [Hz] λ = longueur d’onde de la fréquence transmise [m] v = vitesse radiale [m/s] |
|
| λ |
Prenons un radar opérant dans la bande K (λ≈ 12 mm) et comportant une carte stéréo standard ayant une fréquence de coupure de fc= 18 kHz = fD maximum.
| v = | λ · fD | = | 12 mm· 18 kHz | = 108 m/s ≈ 380 km/h |
| 2 | 2 |
380 km/h est donc la vitesse maximale radiale maximale pouvant être mesurée avec ce radar ce qui est suffisant pour la majorité des détecteurs de mouvement.
Figure 3 : Diagramme d'un radar Doppler à ondes entretenues avec récepteur hétérodyne
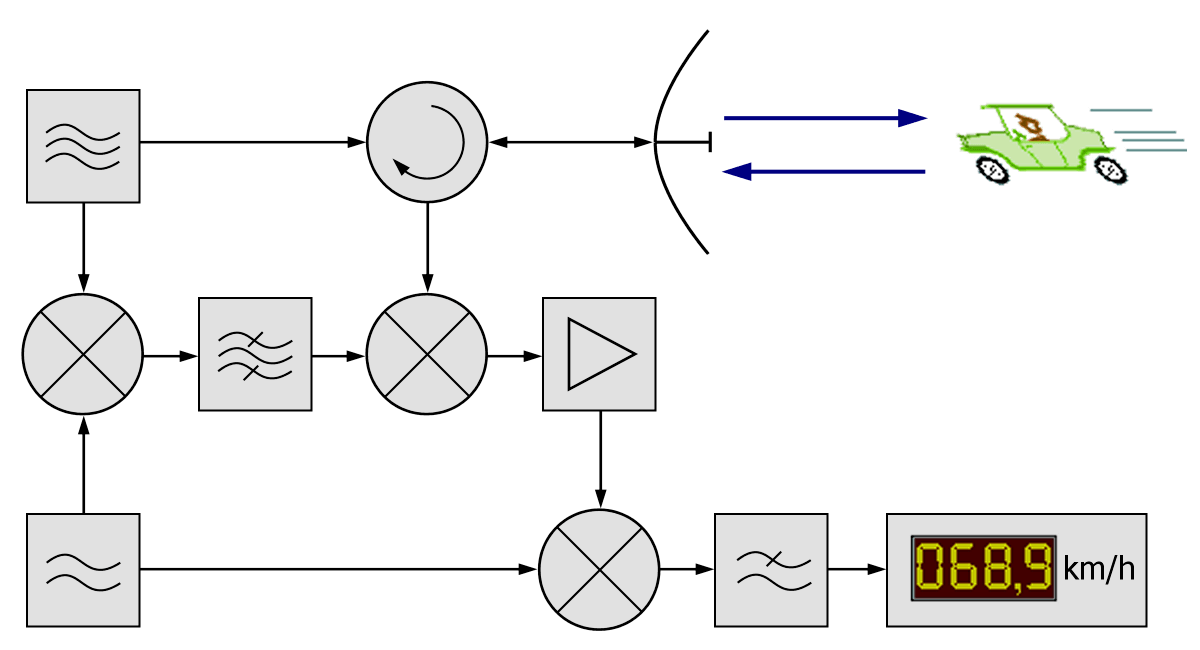
Figure 3 : Diagramme d'un radar Doppler à ondes entretenues avec récepteur hétérodyne
Figure 3 : Diagramme d'un radar Doppler à ondes entretenues avec récepteur hétérodyne (Image interactive)
Superhétérodyne
En procédant à un mélange direct, la sensibilité de l’appareil est limitée car le bruit inhérent du mélangeur s’ajoute au signal de sortie.
Le décalage doppler est donc surimposé à une fréquence aléatoire de basse fréquence et,
dans le cas de faibles signaux provenant de cibles se déplaçant à basse vitesse, peut ne donner qu’une vitesse indéterminée.
Une amélioration importante des radars à ondes entretenues est donc l’utilisation d’un récepteur superhétérodyne. Un étage mélangeur suivi d'un filtre bande étroite génère la fréquence stable de l'oscillateur local par addition de la fréquence de l'émetteur (fÉ) avec une fréquence intermédiaire (fFI), tout en éliminant le bruit aléatoire du mélangeur. L’écho est amplifié ensuite de 30 à 40 dB avant de passer dans un second mélangeur qui réduit la fréquence à celle de base. Dans la sortie résultante, la composante de bruit du second mélangeur est très faible et peut être négligée.
Dans cet exemple, une seule antenne est utilisée pour l’émission et la réception. La séparation de l’énergie émise et reçue se fait à l’aide d’un circulateur. L’évaluation de la vitesse radiale est faite à l’aide d’un compteur et une seule cible peut être évaluée à la fois. Si le radar fait face à plus d’une cible, le décalage de chacune se superpose avec les autres et une série de filtres (ou un filtre ajustable), chacun ayant une plage de fréquences déterminée, doit être utilisé pour repérer le décalage de chaque cible. On peut ainsi savoir les différentes vitesses radiales des cibles mais on ne peut attribuer à quelle cible appartient une vitesse en particulier.
Description des modules dans le schéma fonctionnel
Applications des radars à ondes continues non modulés

Figure 4: TTRAFFIPAX SpeedoPhot, un radar de trafic allemand (© 2000 ROBOT Visual Systems GmbH)

- Contrôle de vitesse routière (cinémomètre)
- Le radar de contrôle de vitesse de la route est une application particulière de ce type de radar. Il utilise le décalage Doppler pour mesurer la vitesse des véhicules sur la route grâce à une très haute fréquence qui correspond aux vitesses normalement possibles.
- La figure 4 montre un tel radar de ROBOT Visual Systems GmbH fonctionnant à 24,125 GHz. Installé face au trafic, il peut mesurer avec une grande précision la vitesse des véhicules s’approchant ou s’éloignant et en prendre la photo.
- Détecteur de mouvement Doppler
Simple et peu coûteux, les capteurs radar Doppler de la figure 2 peuvent servir à déclencher un mécanisme d’ouverture de porte ou d’éclairage dès qu’un mouvement est détecté (ex. ouverture automatique de la porte d’un supermarché). - Surveillance des mouvements
Si la sortie du mélangeur est couplée à une source de courant continue dans la figure 2 (par ex. un transformateur à induction ou des condensateurs) et que l’amplificateur qui le suit est couplé de la même façon, un radar à ondes entretenues non modulées peut surveiller la distance d’une cible fixe avec une précision de l’ordre de λ/16. Le décalage Doppler n’est pas mesuré mais plutôt comparé à la phase de l’angle entre le signal transmis et celle de l’écho. L’aller radar-cible et le retour sont des multiples de la longueur d’onde utilisée. Si la distance change, même de quelques millimètres, la phase change et donnent l’indication d’un mouvement relatif entre le radar et la cible.
- La mesure de la distance est ambigüe car le nombre de longueur d’ondes s’ajoutant au décalage ne peut être déterminé. Le radar ne peut noter que le changement par rapport à la valeur antérieure.
- Ce type de radar peut être utilisé comme un moniteur de rythme cardiaque sans contact. Il est pointé vers le thorax du patient aux soins intensifs et surveille à une fraction de millimètre près la distance. Tout changement de phase de l’angle entre le signal émis et l’écho est alors affiché sur un oscilloscope en fonction du temps. Un ordinateur relié au radar compte les changements périodiques de la distance et calcule le pouls numériquement. Si le mouvement de la cage thoracique cesse, et que le radar ne peut donc mesurer de pouls, une alarme est déclenchée.