Mode S - modulation par déplacement de phase différentielle (MDPD)
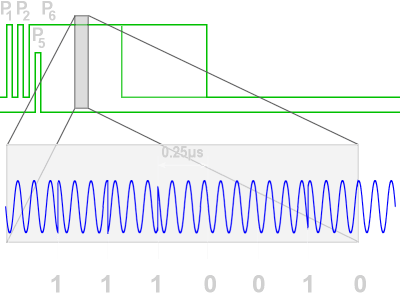
Figure : Mode S - modulation par déplacement de phase différentielle (MDPD)
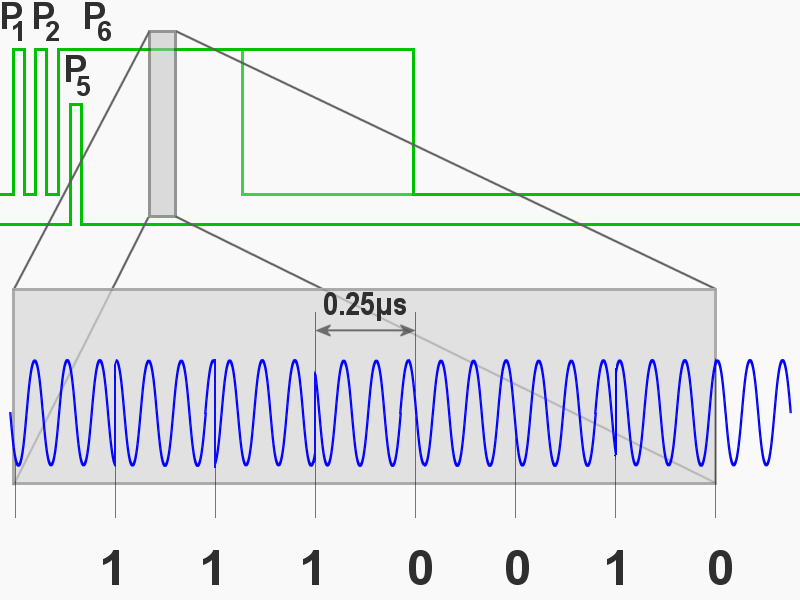
Figure : Mode S - modulation par déplacement de phase différentielle (MDPD)
Mode S - modulation par déplacement de phase différentielle (MDPD)
La durée de l’impulsion P6 d’interrogation en mode S est de 16,25 µs (56 chips) en interrogation courte et 30,25 µs (112 chips) en interrogation longue. Elle débute avec une inversion de phase de 1,25 µs de durée, connue comme l’inversion de synchronisation. Afin de supprimer les interrogations des lobes secondaires, une impulsion P5 est émise par l’antenne omnidirectionnelle de contrôle juste au moment de l’inversion synchronisée ce qui la cache au transpondeur sauf dans le faisceau principal où la P6 sera de beaucoup plus grande amplitude.
L’impulsion P6 est modulée par déplacement de la phase différentielle (MDPD). C’est la série de changements de la phase du signal de l’onde porteuse qui contient l’information et non l’amplitude du signal. Il s’agit d’une sorte de clef de codage qui ne nécessite pas de cohérence entre le signal de référence et le récepteur.
Le premier changement de phase avertit le transpondeur que la question suit. Ensuite, l’impulsion est divisée en sections 0,25 µs (connu comme des « chips ») plus une zone de 0,08 µs où il peut ou non y avoir un changement de phase à 180°. C’est cette dernière qui détermine la valeur binaire du chip (0 ou 1). Le décodeur MDPD compare la phase entre deux « chips » consécutifs et en tire donc ce que la donnée doit être.
Dans l’annexe 10 du volume 4 de l’OACI, le format d’interrogation est décrit ainsi :
« Le bloc de données d’interrogation doit consister en une séquence de 56 ou 112 chips après une inversion initiale de phase dans l’impulsion P6.Une variation de 180 degrés de la phase avant un « chip » lui donne une valeur de UN. S’il n’y a pas d’inversion, sa valeur est ZÉRO. »
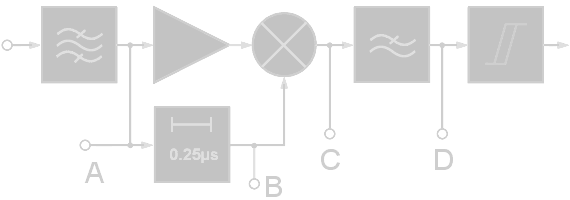
Figure 2 : Diagramme du fonctionnement d’un récepteur MDPD.
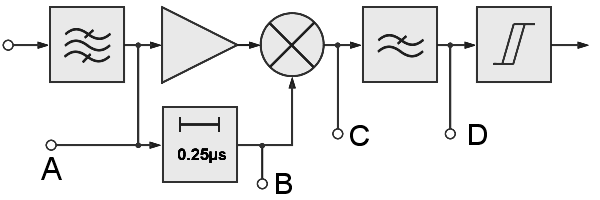
Figure 2 : Diagramme du fonctionnement d’un récepteur MDPD.
La série de chips débute 0,5 µs après l’inversion de phase de synchronisation en début de P6. À fin de cette impulsion, il y a une période de garde de 0,5 µs afin de séparer cette transmission de toute autre subséquente.
La figure 2 montre un circuit permettant la démodulation du signal de l’impulsion P6. Ce décodeur MDPD extrait la phase grâce à un processus complémentaire. Une copie du signal reçu est retardé de 0,25 microsecondes ce qui permet de superposer le signal original et celui retardé pour trouver le début et la fin de l’interrogation. Ensuite, les deux signaux sont mélangés ce qui donne une amplitude plus faible lorsque les deux signaux sont en phase par rapport aux secteurs où ils sont hors-phase. L’amplitude du signal de sortie passe finalement par un filtre passe-bas qui donne la séquence de 0 et 1 qui correspond à l’interrogation.
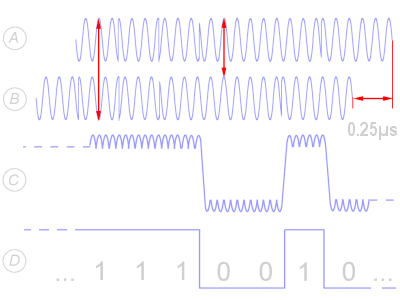
Figure 3 : Analyse de l’onde par un décodeur.
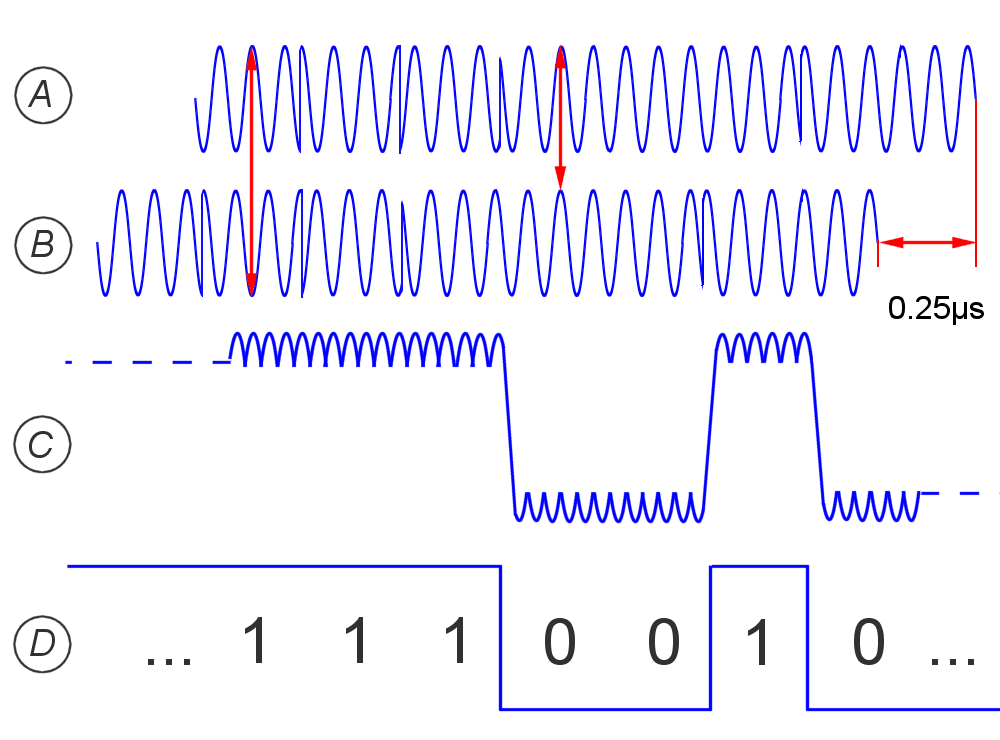
Figure 3 : Analyse de l’onde par un décodeur.
Dans la figure 3, on peut voir le signal (C) de sortie du mélangeur. Il est formé de la superposition du signal retardé (B) et de celui non retardé (A). Une répartition du signal de sortie ne peut se faire que si le changement de phase synchrone au début d'une impulsion P6 déclenche un registre d’horloge qui compte les chips.