Antenne monopulse ou à mono-impulsion
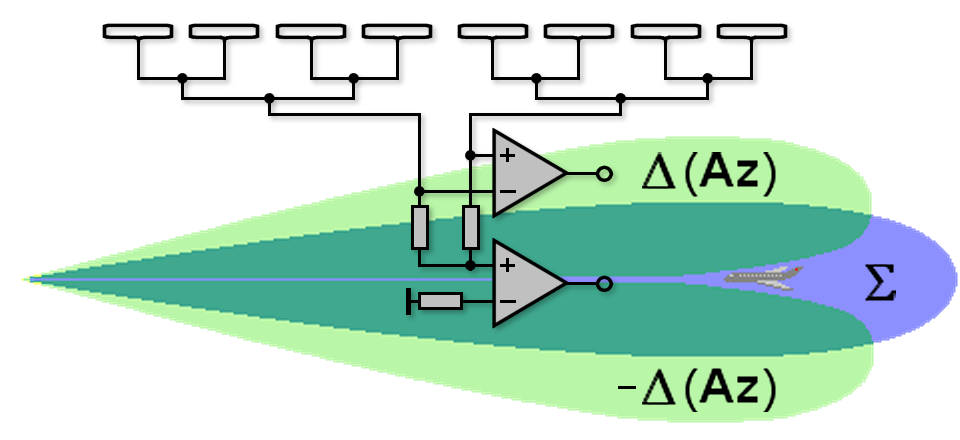
Figure 1 : Diagramme d’une antenne monopulse
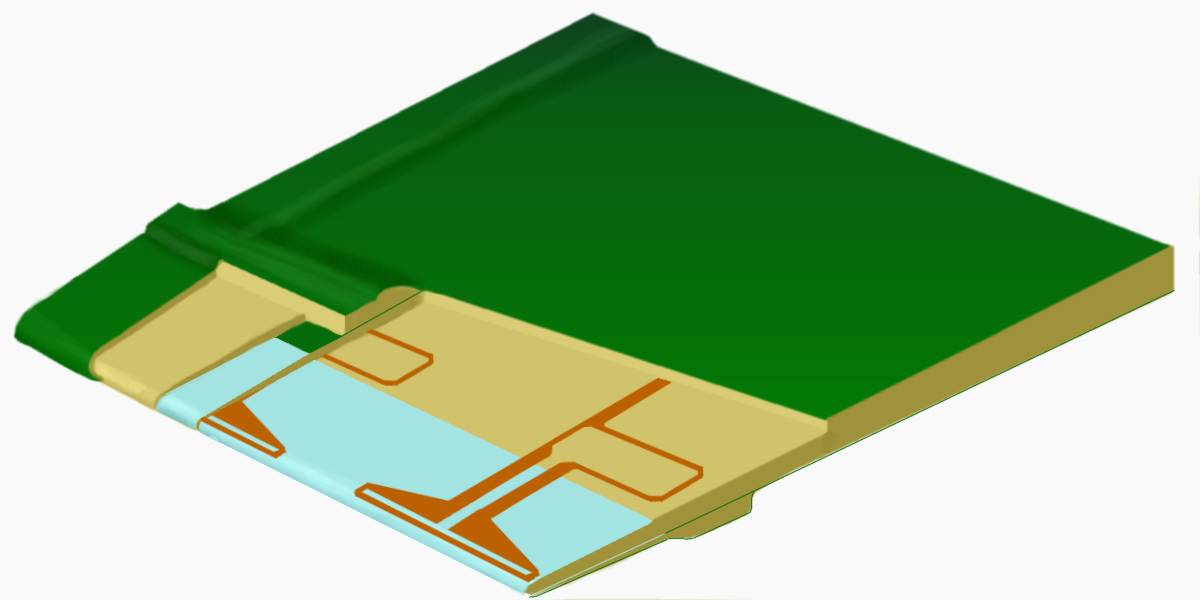
Figure 2 : Vue d’une coupe d’une antenne réseau monopulse
L’antenne mono impulsion est une antenne réseau dont la surface est divisée en quatre quadrants d’émission indépendants. Les éléments de chaque quadrant peuvent émettre dans une phase différente de ceux des autres quadrants et donc couvrir un angle différent. Les retours provenant des quatre secteurs sondés peuvent être additionnés ou soustraits pour déterminer la position exacte de la cible.
- Dans le radar primaire
RRP-117
- Tous les éléments radiants de l’antenne sont alimentés en phase et le diagramme de radiation est la somme de l’émission de tous les éléments ;
- En réception, seulement l’énergie de certains groupes est additionnée pour donner une sortie Somme (Σ) et celle d’autres groupes est soustraite pour donner une sortie Différence (Δ).
- Dans le radar secondaire
IFF/SIF Siemens 1990
- Un groupe d’impulsions est transmis sur des éléments reliés en Somme (Σ) ;
- Un autre groupe est transmis sur des éléments reliés en Différence (Δ).
Une antenne monopulse n’est pas un type particulier d’antennes mais en est plutôt une utilisation particulière. Ainsi voici deux applications de ce principe où le type d’antenne est totalement différent. Dans le premier, un radar primaire de type le RRP 117 utilise une antenne réseau à commande de phase. Dans le second, l’interrogateur d’une antenne de radar secondaire Siemens 1990 est formé d’un groupe d’antennes log-périodiques.
Concept du monopulse
Figure 3 : Estimation de la position angulaire de la cible.
Figure 3 : Estimation de la position angulaire de la cible.
Le radar à mono-impulsion date du développement des radars de poursuite et depuis les années 1970, ce principe a été adapté tant aux radars primaire que secondaires. Dans la figure 3, on peut voir que la cible sera détectée par un radar à balayage conventionnel sur toute la largeur du faisceau. Le maximum d’intensité se trouve à l’angle où elle se retrouve dans l’axe direct du centre du faisceau. Si plusieurs impulsions sont émises durant ce temps de passage, cela cause une erreur de positionnement car chacune des impulsions aura un angle légèrement différent et la cible sera notée à chacun de ces angles. Cette erreur est donc de l’ordre de la largeur du faisceau.
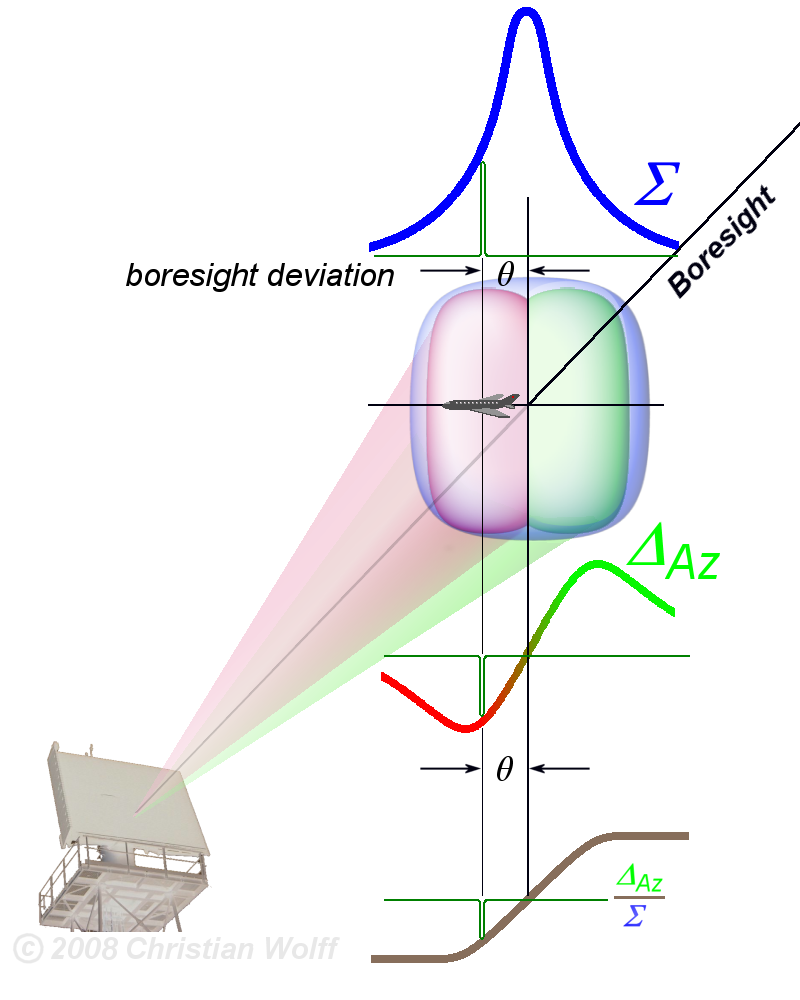
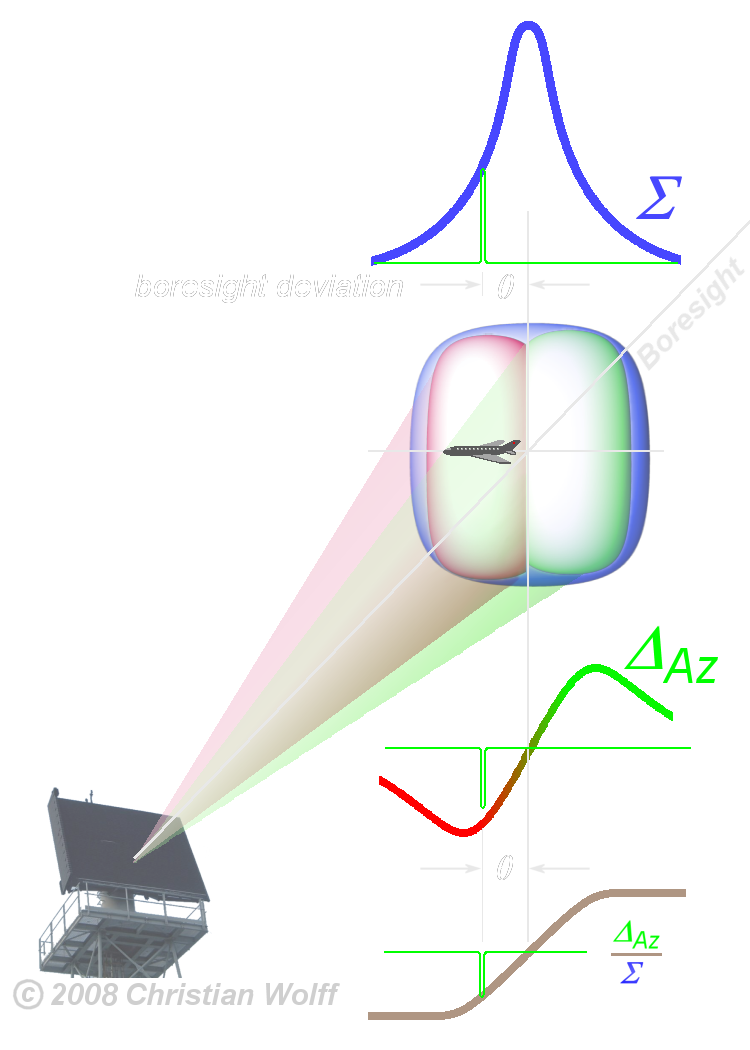
Figure 4 : Principe du système monopulse
Une méthode rudimentaire de déterminer le véritable azimut est de noter la direction où l’on retrouve l’intensité maximale de l’écho de retour au radar. Malheureusement, la mesure de ce maximum sera affectée par le bruit thermique et par la variation de réflectivité intrinsèque de la cible (scintillation). Cette dernière est due à la variation de la section efficace radar de la cible durant le balayage, celle-ci causant une distorsion de l’enveloppe du train d’échos réfléchis.
Un seul écho peut être suffisant
Le principe du radar monopulse permet de solutionner ce problème tout en demandant un moins haut taux d’impulsions pour chaque cible. Ce système permet également un traitement plus sophistiqué qui donne une meilleure qualité de données sur la cible. Une seule impulsion est nécessaire pour déterminer l’azimut de cette dernière, d’où le nom de mono-impulsion ou monopulse.
Les éléments d’une antenne réseau linéaire sont divisés en deux groupes égaux. Ces derniers émettent comme des antennes séparées dans le plan focal, de chaque côté de l’angle de visée central. En transmission (Tx), chaque groupe est synchronisé en phase pour donner sa moitié du diagramme d’émission total, ou diagramme Somme (Σ) en bleu de la figure 4. Dans la figure 4, le graphique du haut montre Σ, le diagramme d’émission de l’antenne.
En réception (Rx), l’écho de retour est reçu par les deux moitiés de l’antenne. Il est alors possible de faire la somme (Σ), comme en émission, ou la différence (Δaz) de leur intensité. Cette dernière est appelé différence en azimut ou diagramme Delta-azimut. Dans la figure 4, le graphique Δaz montre la différence de réception azimutale pour une cible qui se trouverait à droite de l’axe du faisceau. En faisant le rapport Δaz sur Σ, comme dans le graphique du bas, on obtient l’azimut réel de la cible. La différence d’angle avec l’angle de visée du radar est appelé angle hors-azimut, indiqué ici par OBA.
L’angle de site est également mesuré dans un radar 3D. La procédure pour trouver la variation par rapport à l’angle de site de l’antenne est identique, soit de diviser le réseau d’éléments en deux groupes verticaux. La différence dans ce cas s’appellera Delta élévation ou Δel. En combinant la recherche en azimut et en élévation, on doit donc diviser l’antenne réseau en quatre quadrants égaux: deux en haut et deux en bas.
II |
I |
III |
IV |
II |
I |
III |
IV |
Figure 5 : Les quatre quadrants d’une antenne monopulse en 3D.
On peut donc trouver les sommes et différences provenant des quatre quadrants ainsi :
The following signals are formed from the received signals of these four quadrants :
- Somme Σ ( I + II + III + IV ) ;
- Différence en azimuth ΔAz ( I + IV ) - ( II + III ) ;
- Différence en élévation ΔEl ( I + II ) - ( III + IV ).
Signal auxiliaire Ω
Pour compléter les données, il faut parler du signal auxiliaire Ω. Ce dernier ne fait pas partie à proprement parler de l’antenne mono-impulsion. Il est émis par une petite antenne indépendante ayant un large diagramme d’émission et sert à compenser pour les effets des lobes secondaires de l’antenne monopulse. Il sert également à reconnaître le brouillage actif dans le secteur sondé.
Au total, il faut donc quatre récepteurs distincts pour faire fonctionner une telle antenne et tout radar 3d moderne a au moins ce nombre disponible.