Monopulse Antenna
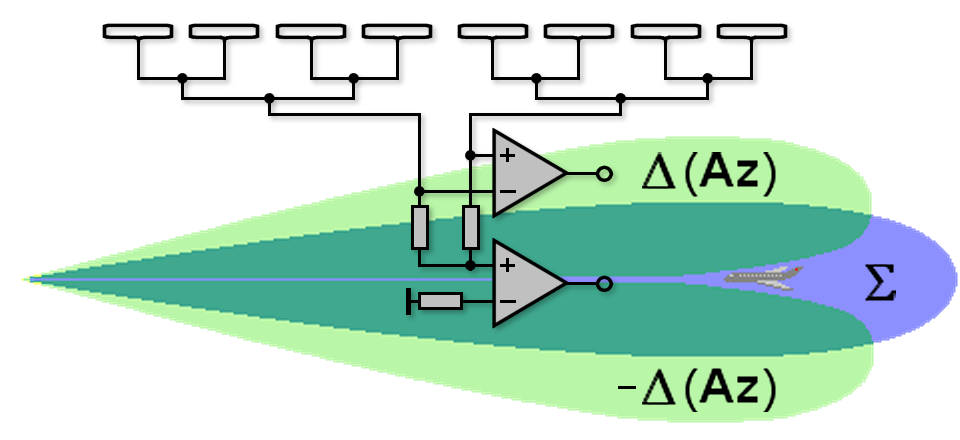
Figure 1: Principle of monopulse antennae: a Sum channel and a difference channel
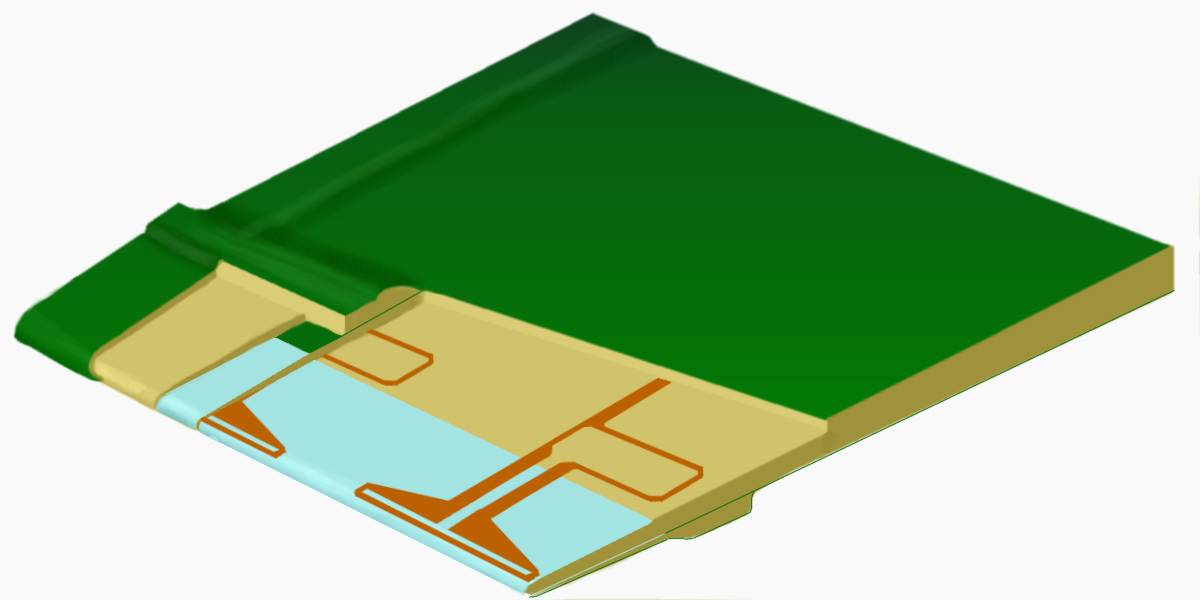
Figure 2: sectional picture of an antenna array of a monopulse antenna
Under this concept antennae are combined which are built up as an antenna array and which get a special method in the feeding: The single antenna elements aren't always together switched in phase! For different purposes various sums and differences can be formed from the received energy.
- In the primary radar unit
RRP-117
- all antenna elements are fed in phase and the radiation patterns are summarized
- Certain groups are only summarized in the reception time and their sums or differences feed own receive channels.
- In the secondary radar unit
IFF/SIF Siemens 1990
- an impulse group is transmitted on the sum channel and
- an impulse in the difference channel.
These two examples point: A monopulse antenna isn't an own basic antenna model.
The interrogator Siemens 1990 uses an antenna group from
logarithmic periodical antennae and the RRP 117 has got a
Phased Array antenna.
Monopulse Concept
Figure 3: estimating of the angular position in older radars (not using a monopulse method)
Figure 3: estimating of the angular position in older radars (not using a monopulse method)
Monopulse radars find their origin in tracking systems. Since the late 1970s, the principle of monopulse has been adapted to suit PSR and SSR systems and is in common operational use world-wide today.
A target will be seen by radar from the moment it enters the main antenna beam or from the moment it is illuminated by the transmitted radar antenna beam. A search radar always makes an error in the determination of the direction of the target because it makes the assumption that the target is situated in the direction of the axis of the main beam of the antenna. This error is of the order of the beamwidth of the main antenna beam.
A crude way of determining angular position of a target is to move the antenna past the target direction and note the pointing direction that gives the maximum echo amplitude.
Unfortunately, the estimated azimuth position will be effected by thermal noise errors and target fluctuation errors (scintillation). The target fluctuation error is due to the cross-section changing of the target during the time-on-target of the antenna which gives a distortion of the envelope of the reflected pulse train.
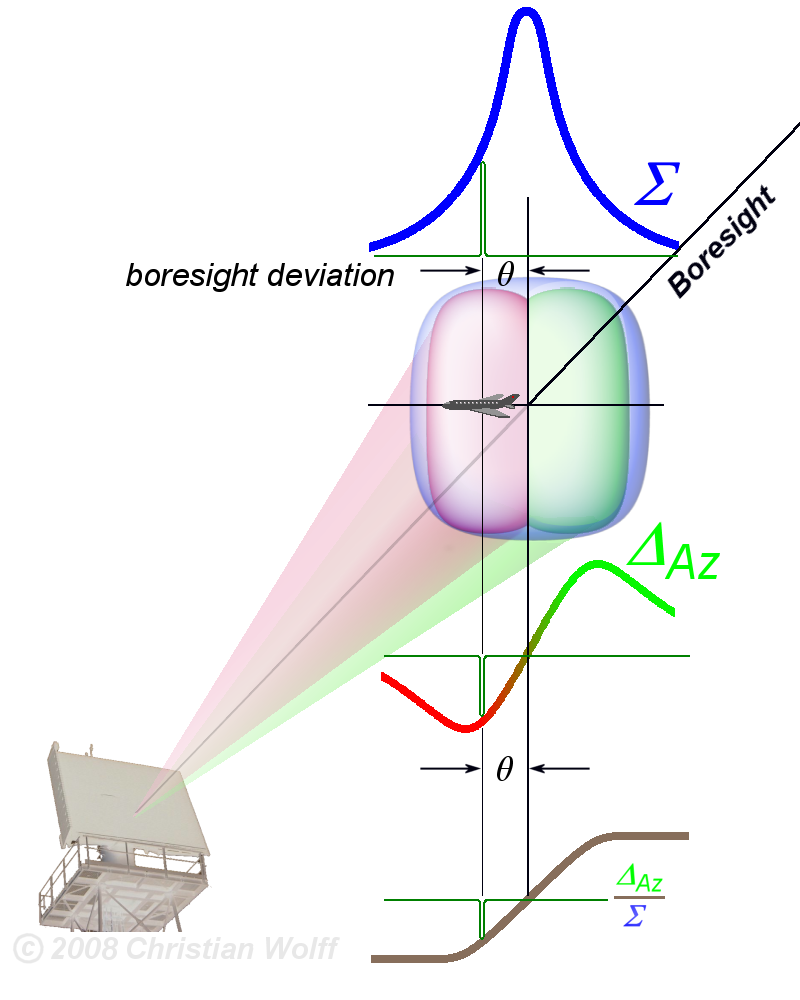
Figure 4: Principle of a monopulse system
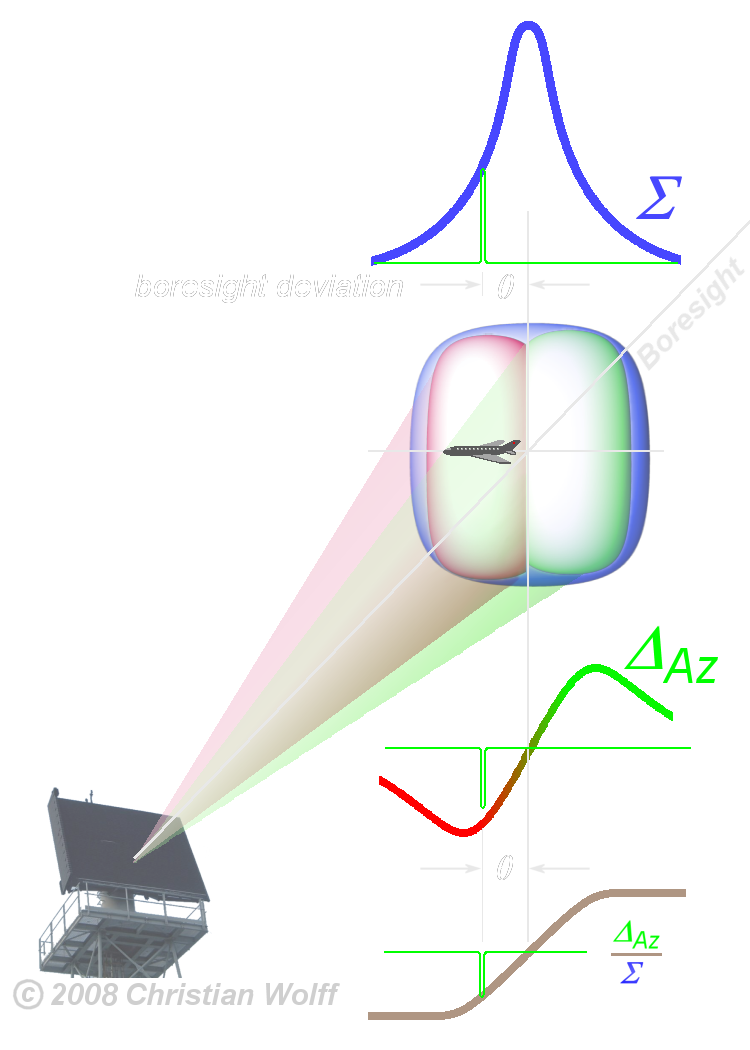
One received echo is sufficiently!
Monopulse gives much better target azimuth measurements than the estimating of the angular position shown in figure 1. It can operate at a much lower interrogation rate to benefit others in the environment. Monopulse systems usually contain enhanced processing to give better quality target code information. A single pulse is sufficiently for monopulse bearing measurement (hence the use of the term monopulse).
The elements in linear antenna array are divided into two halves. These two separate antennae arrays are placed symmetrically in the focal plane on each side of the axis of the radar antenna (this often called boresight axis). In transmission (Tx) mode, both antennae arrays will be fed in phase and the radiation pattern is represented by the ice blue area, which is called the Σ or Sum -diagram. (shown in Figure as blue graph and pattern)
In reception (Rx) mode an additional receiving way is possible. From the received signals of both separate antenna arrays, it is possible to calculate Σ (like the transmitted Sum -diagram) and the difference ΔAz, the so-called Delta azimuth- diagram. The antenna pattern is given by the red and green area on the same figure. Both signals are then compared as a reply processor function and their difference is used to estimate the azimuth of the target more exactly.
The angle between the axis of the antenna (boresight axis) and the direction of the target is also known as OBA-value (Off-Boresight Angle).
The elevation angle is also measured at 3D radars as a third coordinate. Well, the procedure is used twice now. Here the antenna is derived in addition in an upper half and a lower half. The second difference channel (ΔEl) is called „Delta Elevation” now.
II |
I |
III |
IV |
II |
I |
III |
IV |
Figure 5: the four quadrants of a monopulse antenna
The Monopulse antenna is divided up into four quadrants now:
The following signals are formed from the received signals of these four quadrants:
- Sum - signal Σ ( I + II + III + IV )
- Difference - signal ΔAz ( I + IV ) - ( II + III )
- Difference - signal ΔEl ( I + II ) - ( III + IV )
The · Auxiliary Signal Ω
also shall to complete the picture be mentioned, although this one isn't tied to the monopulse antenna. This channel to the compensation of side lobes always has practically its own small antenna and has a very wide antenna diagram and also serves for the reconnaissance of active jamming.
All these signals need an own receiver channel. Well, modern 3D- radar sets have at least four parallel receiver- channels.
If the primary radiators of the monopulse antenna consist of feed horns, then the distribution of the received signals can be performed with a monopulse duplexer.