Local Tracking
Recent radars can create plots and tracks automatically using radar echo signals. The system can calculate the tracked object's course, speed and closest point of approach (CPA). These radars can be included into a traffic collision avoidance system to avoid of collision with the other aircraft (airborne collision avoidance system, or ACAS). In aviation are used data of primary and secondary radar, in maritime radars the data of primary radar only. Local tracking in maritime radars is called Automatic Radar Plotting Aid (ARPA or ARPA-functionality).
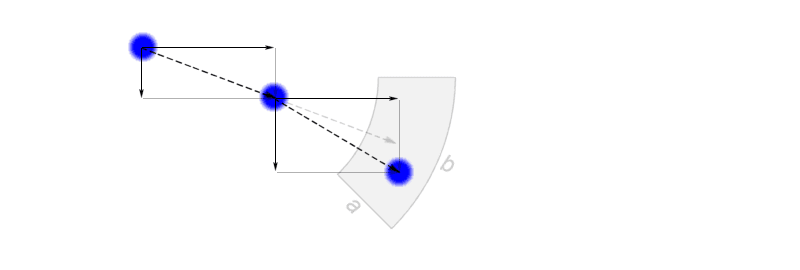
Radar target reports shall be transmitted either in the form of plots or tracks. A track is a superset of a plot, containing additional data generated by a local tracking system at the radar site. The local tracker attempts to update the track by forming a weighted average of the current reported position from the radar and the last predicted position of the target from the tracker. Each plot is checked against the tracked targets and if certain criteria are fulfilled the plot is associated with a tracked target. Any plots that are not associated with a tracked target may be used for acquisition of new tracks.
antenna revolution time, or
plot/track update time
Figure 1: Plot estimation
antenna revolution time, or
plot/track update time
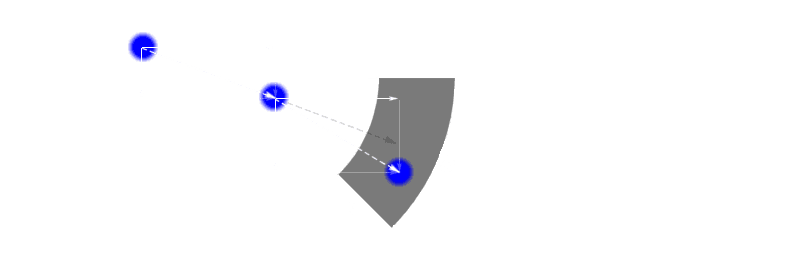
Figure 1: Plot estimation
Tracking is made particularly difficult for targets with unpredictable movements, detection in the presence of non-uniformly distributed clutter or even jamming, missed detections or false alarms. A radar tracker typically uses an increasingly sophisticated set of algorithms to resolve these problem. Due to the need to form radar tracks in approximately real time, usually for several hundred targets at once, the deployment of radar tracking algorithms has typically been limited by the available computational power.
The radar tracker seeks to determine which plots should be used to update which tracks. The first step in the process is to update all of the existing tracks to the current time by predicting their new position based on the most recent state estimate (e.g. position, heading, speed, acceleration, etc.) and the assumed target motion model (e.g. constant velocity, constant acceleration, etc.). Having updated the estimates, it is possible to try to associate the plots to tracks.
This can be done in a number of ways:
- By defining an “acceptance gate” around the current track location and then selecting:
- the closest plot in the gate to the predicted position, or
- the strongest plot in the gate
- By a statistical approach that choose the most probable location of plot through a statistical combination of all the likely plots. This approach has been shown to be good in situations of high radar clutter.
Once a track has been associated with a plot, it moves to the track smoothing stage, where the track prediction and associated plot are combined to provide a new, smoothed estimate of the target location.
Having completed this process, a number of plots will remain unassociated to existing tracks and a number of tracks will remain without updates. This leads to the steps of track initiation and track maintenance.