Detection of hovering helicopters
With old analog radar sets, it was almost impossible to distinguish an hovering helicopter in the air from fixed clutter. Only very much practical experience of the operator could lead here to the decision that this additional fixed target does not belong there and must therefore be something other than clutter. But what is the difference between a hovering helicopter and a fixed target?
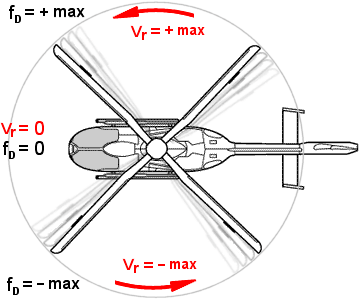
Figure 1: Relative radial speeds at a hovering helicopter
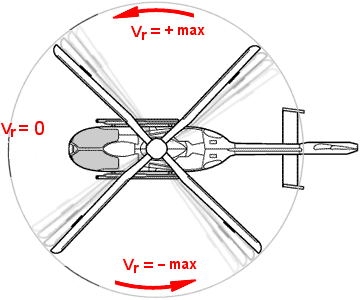
Figure 1: Relative radial speeds at a hovering helicopter
The rotor's turning! Although the helicopter does not move over the ground, a very high Doppler frequency fD can be measured. So that's two characteristics already:
- no (or very low) speed above ground, therefore the echo signal always has a frequency component without or very low Doppler frequency:
frx = ftx
- very high Doppler frequency (almost sound speed of the rotor ends)
| fD = | 600 m/s |
| λ |
Older systems for the selection of moving targets, however, had problems with the fact that the rotors simultaneously moved towards and away from the radar with the same radial velocity. Third characteristic is therefore:
- two Doppler frequencies of opposite direction occur:
frx = ftx ± fDoppler
These two Doppler frequencies have the same magnitude only at hoverimng helicopter. The difference of both Doppler frequencies is a measure of the radial velocity of the helicopter.
In addition, the radar with a relatively large pulse period always sees only a “snapshot” of a random rotor blade position, i.e. the observed Doppler frequency fluctuates strongly from pulse to pulse. Very sensitive radar sets (with a relatively high transmission frequency) would even receive the vibration of the entire helicopter as a significant Doppler frequency and recognize the turbulence of the hot engine exhaust as additional targets.
Using the Fast Fourier Transformation, (FFT), all Doppler frequencies can be recognized as a typical spectrum and the signal processor generates the target sign of a helicopter. Very sensitive systems can now even recognize how many rotor blades the helicopter has by the change of the Doppler frequency per time unit and with how many revolutions per minute they rotate, whether it is a heavy or light helicopter!
In theory, it would even be possible to calculate the type of helicopter from a single echo pulse, to calculate the course (depending on aspect angle) and the speed of the helicopter.