Enchevêtrement
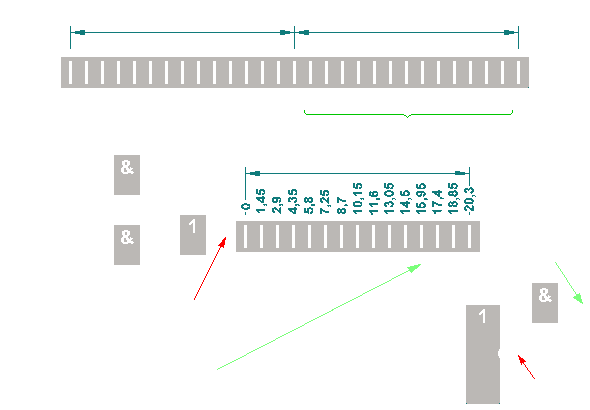
L’enchevêtrement de réponses est un problème fondamental dans les radars secondaires classiques et l’augmentation du trafic aérien n’a fait que l’exacerber. Les avions sont souvent très rapprochés en distance et azimut mais à différentes altitudes. Une bonne partie des réponses peut provenir de deux appareils le long d’azimuts voisins et séparés d’une distance en portée inférieure à la longueur de leur message, soit 1,7 mille marin (20,3 µs). Ces réponses vont donc se superposer en partie lors de la réception par le radar.
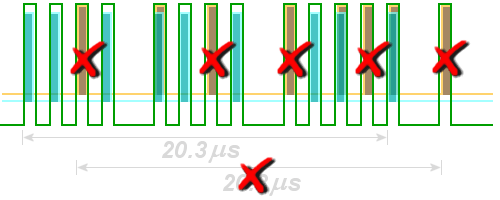
Figure 1 : Enchevêtrement synchrone.
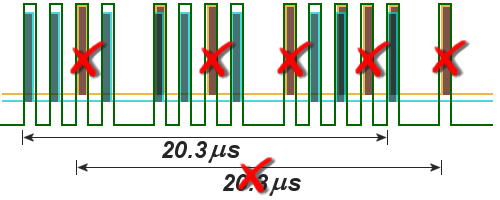
Figure 1 : Enchevêtrement synchrone.
Figure 1 : Enchevêtrement synchrone.
Avec des techniques et algorithmes de traitement des réponses, il est possible dans certains cas d’extraire toute ou une partie des réponses. Le cas le plus difficile est celui où la distance angulaire entre les aéronefs est à l’intérieur de la largeur du faisceau. Pendant le temps d’éclairement des deux appareils, plusieurs impulsions d’interrogations leurs seront envoyées et toutes auront des réponses enchevêtrées. Dans ce cas, tout traitement pourrait être impossible.
On distingue deux types d’enchevêtrement selon la superposition des données:
- Enchevêtrement asynchrone;
- Enchevêtrement synchrone
L’enchevêtrement asynchrone se produit quand la distance entre les deux appareils n’est pas un multiple de la différence de temps entre les impulsions contenues dans leurs réponses. Les diverses impulsions du premier appareil et celles du second ne se superposent pas mais alternes dans le message reçu. Il est possible de les séparer en les attribuant alternativement à l’un ou l’autre des appareils dans une mémoire. Une fois cela fait, la réponse de chaque appareil peut être décodée.
L’enchevêtrement synchrone est le cas où la distance entre les deux appareils est un multiple de la différence de temps entre les impulsions. Les deux messages se superposent alors exactement après à partir d’une des impulsions. Il est impossible de savoir à quelque réponse appartiennent les impulsions et le décodage du message donne un résultat aléatoire. Ces réponses doivent donc être éliminées.
F1 C2 F2 SPI
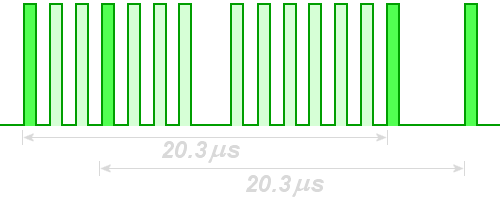
Figure 2 : Détection fantôme des impulsions d’encadrement C2-SPI
F1 C2 F2 SPI
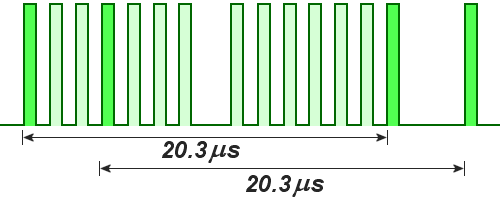
Figure 2 : Détection fantôme des impulsions d’encadrement C2-SPI
F1 C2 F2 SPI
Figure 2 : Détection fantôme des impulsions d’encadrement C2-SPI
Les circuits électroniques qui réduisent les effets d’enchevêtrement sont appelés « circuit de démêlage ». La détection des impulsions d’encadrement se fait en général par une ligne à retard numérique qui se trouve à déplacer une grille de 20,3 µs de part et d’autre de la réponse enchevêtrée pour repérer la paire d’impulsions F1-F2 (F1 et F2 étant les impulsions d’encadrements du massage). Malheureusement, l’impulsion d’identification à usage spécial (SPI) est exactement décalée de 20,3 µs de l’impulsion C2 d’un message normal et si ces deux impulsions sont présentes, cela crée une détection fantôme du duo C2-SPI qui peut être décodée et affichée à l’écran radar. Comme l’information provient d’un avion avec lequel le contrôleur aérien est en ligne, il serait important de ne pas l’éliminer comme les autres réponses d’enchevêtrement synchrones.
Les réponses qui sont rapprochées dans le temps sont un autre cas spécial. Il s’agit de messages qui arrivent espacés d’exactement 20,3 µs de telle sorte que l’impulsion de fin du premier (F2) et la première du second (F1) peuvent être erronément prises pour la paire F1-F2 d’un message fantôme.
| Enchevêtrement | Impulsions | À afficher |
|---|---|---|
| Asynchrone | 
|
|
| Synchrone | 
|
|
| Détection fantôme C2-SPI | 
|
|
| Paire approchée | 
|
Tableau 1: Sortes d’enchevêtrements
Circuits de démêlage
Pour reconnaître et traiter les cas d’enchevêtrement, des circuits électroniques spéciaux sont nécessaires.
impulsions d’encadrement »
vêtrement »
Figure 3 : Principe d'un circuit de démêlage

impulsions d’encadrement »
vêtrement »
Figure 3 : Principe d'un circuit de démêlage
impulsions d’encadrement »
vêtrement »
Figure 3 : Principe d'un circuit de démêlage
Les lignes à retard donnent chacune un délai de 1,45 µs au signal brut (celui des impulsions dans les réponses standard). Elles peuvent être un circuit électrique ou un simple décalage dans les registres de la mémoire électronique. Le processus de traitement peut être contrôlé ainsi.
Séquence des opérations durant une réexécution :
| ||
Étape lors de la reconnaissance d’enchevêtrement
| ||
Étapes lors de la détection du fantôme C2-SPI
|