Radar pseudo-cohérent
Coupler
mélangeur
de fréquence
intermédiaire (FI)
à magnétron
de phase
signal radar
mélangeur
cohérent
nisateur
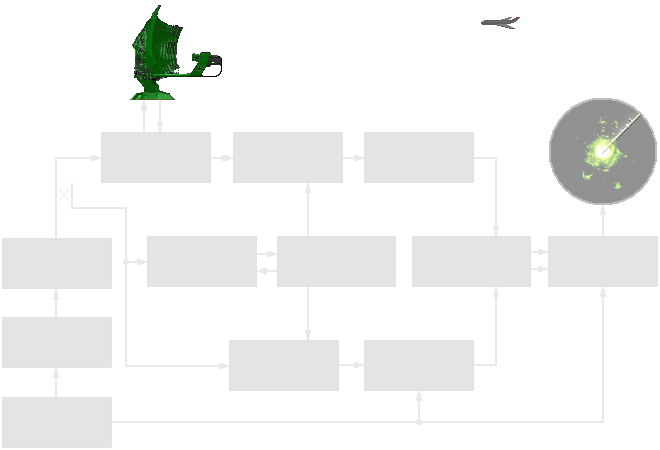
Figure 1 : Diagramme d’un radar pseudo-cohérent.
Coupler
mélangeur
de fréquence
intermédiaire (FI)
à magnétron
de phase
signal radar
mélangeur
cohérent
nisateur
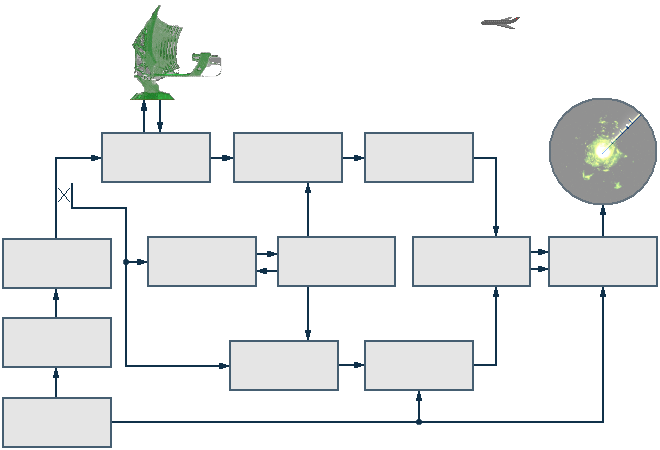
Figure 1 : Diagramme d’un radar pseudo-cohérent.
nisateur
Figure 1 : Diagramme d’un radar pseudo-cohérent.
(Image interactive)
Radar pseudo-cohérent
Afin de pouvoir utiliser l’effet Doppler dans le traitement des données d’un radar, il est nécessaire que les impulsions émises par ce dernier soit cohérentes, c’est-à-dire qu’il leur phase à l’émission soit connu et stable. On peut ainsi être sûr que le décalage Doppler reliée au mouvement de la cible n’est pas contaminé par un changement de phase entre les impulsions subséquentes. Ce décalage permet deux choses: reconnaître les cibles dans un environnement où se trouvent des échos parasites fixes et calculer leur vitesse de déplacement instantané.
Si le transmetteur utilise un auto-oscillateur, comme un magnétron, l’impulsion émise aura une phase aléatoire. En détection cohérente, une onde provenant d’un oscillateur stable d’onde continue, servant de référence, sera ajoutée à un échantillon de chacune des impulsions émises pour produire un battement qui servira de « signature » à ces impulsions. Au retour de la cible, les échos seront mélangés avec l’onde de référence pour calculer le battement et donc de quelle impulsion particulière provient le retour. Les radars pseudo-cohérents sont ainsi appelés « cohérents à la réception ».
Duplexeur
Le duplexeur est un circuit électronique qui relie l’antenne alternativement avec le transmetteur et le récepteur dans le cas d’un radar monostatique. Il permet donc d’utiliser la même antenne lors de l’émission et de la réception. Après le basculement, le circuit doit être complètement étanche à toute fuite venant de l’autre contact. En effet, le récepteur traite de très faibles signaux et sera grillé par le signal provenant du transmetteur.
Mélangeur
La fonction du mélangeur est de convertir le signal de radiofréquences reçu vers une fréquence intermédiaire (FI) plus basse qu’il sera plus aisé à amplifier et à traiter électroniquement. La FI, habituellement de 30 à 74 MHz, est obtenue par un traitement hétérodyne du signal reçu avec l’onde de l’oscillateur local stabilisé (OLS). Le mélangeur convertit ainsi le signal reçu sans distorsion des données qu’il contient.
Amplificateurs de FI
Après la conversion à la fréquence intermédiaire (FI), le signal est rehaussé par une série d’amplificateurs. La majorité du gain du récepteur est obtenu à cette étape. La bande passante du récepteur est souvent caractérisée par celle des amplificateurs de cette partie du circuit.
Commande automatique de fréquence (CAF)
Tous les récepteurs superhétérodynes doivent être synchronisés avec la fréquence du signal à recevoir. La commande automatique de fréquence est un dispositif qui règle automatiquement au mieux la fréquence de fonctionnement d'un récepteur radioélectrique par rapport à la fréquence centrale d'un signal incident.
Ce circuit utilise un échantillon atténué du signal transmis mélangé à l’onde de l’oscillateur local synchronisé ce qui donne un signal à fréquence intermédiaire (FI). Ce signal est alors appliqué à un discriminateur de fréquence dont le rôle est de transformer les variations de fréquence de la FI en variations de tension continue correspondante, de façon à provoquer un réajustement de la fréquence de l’oscillateur local.
Oscillateur local stabilisé (StaLo)
Les récepteurs sont généralement super hétérodyne et nécessitent un oscillateur local stabilisé (OLS), connu aussi par son acronyme anglais de StaLO. La fréquence intermédiaire (FI) qui servira à la réception se situe le plus souvent entre 30 et 74 MHz et est produite par le mélange l’onde de l’OSL et du signal radar.
Pour une opération efficace, il faut donc que l’OSL soit ajustable et très stable. Par exemple, si la fréquence d’un oscillateur de 3 000 MHz varie de 0,1 %, cela résulte en un changement de 3 MHz. Ceci est égal à la largeur de la bande passage de la plupart des récepteurs et diminuerait grandement le gain de réception si on le laisse se produire.
La puissance de sortie de la plupart des OLS est faible, 20 à 50 milliwatts, parce que les récepteur utilise un mélangeur à cristaux ne nécessitant que peu de d’énergie. La fréquence de sortie de l’OLS doit être ajustable sur une gamme de plusieurs MHz, dans la plage autour de 4 000 MHz, pour compenser la variation de la fréquence émise pour maintenir une différence de 30 à 74 MHz entre les deux signaux. Cela est surtout obtenu en ajustant le voltage à l’entrée de l’OLS.
Détecteur de phase
Le signal FI passe dans un détecteur de phase qui le ramène à la fréquence de base tout en gardant les composantes en phase et en quadrature (I et Q) d’information Doppler. Cela veut dire qu’il donne un signal vidéo dont l’amplitude est proportionnelle à la différence de phase entre le signal de l’oscillateur cohérent (Coho) et le signal FI. Cette différence est la même que celle entre l’impulsion transmise et l’écho de la cible. Le résultat vidéo peut être positif ou négatif.
Processeur de signal
Le processeur du signal radar est un système électronique où entre le signal brute revenant du récepteur et qui donne à la sortie les échos réels. Il sépare ces derniers des échos parasites grâce à leur vitesse radiale Doppler et à leur intensité caractéristique.
Coupleur directif
Le coupleur directif est une jonction réciproque de deux guides d'ondes, quatre bras, dans laquelle l'énergie passant dans l'un des guides d'ondes est couplée à un bras seulement de l'autre guide d'ondes. Ce dernier procure un échantillon de l’onde transmise à chaque impulsion pour l’ajustement de l’OLS par la commande automatique de fréquence, et surtout l’ajustement de l’oscillateur cohérent (Coho) pour le synchroniser avec le magnétron. Cette synchronisation sert de « signature » de chaque impulsion puisqu’un magnétron émet avec une phase aléatoire.
Mélangeur
La fonction du mélangeur est de convertir le signal de radiofréquences reçu vers une fréquence intermédiaire (FI) plus basse qui sera plus aisée à amplifier et à traiter électroniquement. La FI sert de synchronisation de phase avec l’oscillateur cohérent (Coho) pour chacune des impulsions.
Oscillateur cohérent (Coho)
The Coherent Oscillator (COHO) provides a low-power continuous RF-energy. It enables the down conversion process into the phase sensitive detector, whilst maintaining an accurate phase reference. The coho lock pulse is originated by the transmitted pulse. It is used to synchronize the coho to a fixed phase relationship with the transmitted frequency at each transmitted pulse.
The COHO takes over the phase of the transmitter tube and provides it to the receiver part of the system. This is the reason why the pseudo-coherent radar is also called “coherent on receive”.
Modulator
L’impulsion émise par le transmetteur est déclenchée par le modulateur. Il s’agit de la source d’une impulsion de grande énergie en courant continu qui met sous tension le tube à vide d l’oscillateur produisant le signal.
Antenne
L'antenne diffuse l'énergie de l'émetteur dans l'espace dans un volume déterminé et avec l'efficacité voulue. Le processus est identique à la réception, l'antenne captant alors l'énergie diffuse dans un volume d'espace donné et selon son efficacité.
Indicateur
L'indicateur doit en permanence mettre à disposition de l'utilisateur une représentation graphique facilement interprétable de la position relative des cibles détectées par le radar.
Synchronisateur
Ce synchronisateur délivre le signal qui synchronise la transmission des impulsions, l'écran de visualisation et les autres circuits associés.
Inconvénients du radar pseudo-cohérent
Le radar pseudo-cohérent est peu commun aujourd’hui, surtout retrouvé dans les systèmes plus anciens et les radars peu coûteux, à cause de ses inconvénients :
- La synchronisation nécessaire pour obtenir la « signature » de chaque impulsion n’est pas aussi précise que l’utilisation d’un système entièrement cohérent, ce qui limite l’efficacité du processus de filtrage des échos parasites;
- Il ne peut être utilisé pour les radars agiles en fréquence car la fréquence d’un magnétron se fait en modifiant mécanique les dimensions de la cavité d’un magnétron ce qui veut dire que la largeur de sa bande passante est très faible ;
- Il est peu flexible car on ne peut changer facilement la fréquence de répétition et la largeur des impulsions, ainsi que d’autres paramètres du signal, contrairement aux radars entièrement cohérents. Il est également impossible de moduler en fréquence l’impulsion, une technique utilisée dans la compression d’impulsions ;
- Les échos de second retour, ceux revenant d’au-delà de la portée maximale après qu’une seconde impulsion est émise, ne sont pas en phase avec la « signature » produire par l’oscillateur cohérent (Coho). Ils sont donc non seulement en ambiguïté de distance mais également ne peuvent être utilisés pour le traitement Doppler car ils ne sont pas corrélés avec la « signature ». Cependant, cet effet peu être surmonté si la « signature » de chaque impulsion envoyée peut être conservée en mémoire et utilisée en post-traitement.