Balayage conique
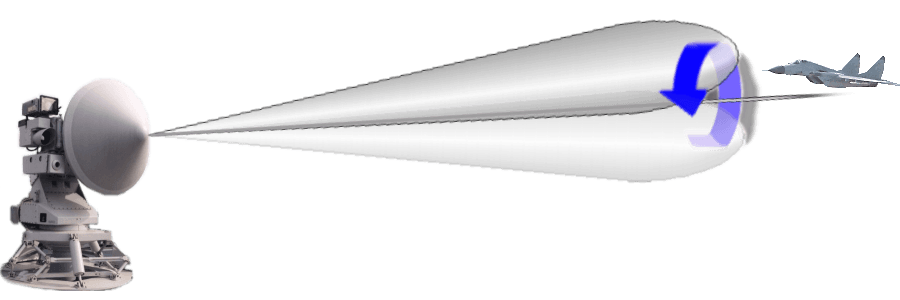
Figure 1 : Le faisceau d’une antenne à balayage conique effectue une rotation décentrée autour de son axe de visée. Il balaie donc un cône autour de cet axe en élévation et azimut.
Figure 1 : Le faisceau d’une antenne à balayage conique effectue une rotation décentrée autour de son axe de visée. Il balaie donc un cône autour de cet axe en élévation et azimut.
Les radars plus anciens utilisent un balayage conique pour préciser la position des cibles. La figure 1 montre une telle antenne où le cornet d’alimentation effectue une rotation décentrée autour du point focal ce qui donne un faisceau qui balaie un cône autour de l’axe de visée et dont l’apex est l’antenne. La rotation du cornet est commandée par un moteur situé derrière l’antenne et le système note toujours à quel point il est rendu dans sa rotation.
Pour une distance donnée de l’antenne, la trajectoire du lobe principal du faisceau effectue donc un cercle. À l’intérieur de la portée utile du radar, le bord interne du faisceau doit toujours recouper l’axe de visée. Si une cible est directement le long de cet axe, l’intensité de l’écho de retour sera constante durant toute la rotation. Par contre, si la cible se trouve légèrement hors de l’axe, le signal sera plus fort de ce côté. Ainsi, il est possible de connaître l’erreur en azimut et élévation entre l’angle de visée et la position réelle de la cible.
Par exemple dans la figure 2, la cible se trouve à gauche de l’axe de visée. L’animation montre que le signal varie en intensité selon l’angle auquel le lobe est rendu dans sa rotation. Zéro degré est par convention la position directement en haut de l’axe de visée et la rotation s’effectue vers la droite. L’intensité minimale de l’écho de retour sera quand le faisceau sera à 90 degrés, à droite de l’axe de visée, et le signal maximal sera à 270 degrés, soit directement à gauche de l’axe. En autant que la cible est à l’intérieur du cône de balayage, on peut la repérer.
L’information sur l’angle de l’intensité maximale et celle de l’axe de visée sont entrées dans l’ordinateur d’analyse des données radar, appelé le plus souvent ordinateur de pointage automatique ou servo-pointeur. Si ces données montrent que la cible est hors de l’axe de visée, l’ordinateur commande une correction à la position de l’antenne par servomécanismes afin de suivre la cible au plus près. Cette correction est calculée grâce aux données recueillies.
Figure 2 : Animation d’un balayage conique
L’émission et la réception du radar peuvent être à balayage conique mais un système courant est d’utiliser ce type de balayage en réception seulement, une méthode appelée en anglais Conical Scan on Receive Only (COSRO).
Le défaut du balayage conique est que la force du signal reçu varie souvent pour des raisons autres que la rotation du lobe. Par exemple, sur une période de quelques dizaines de secondes, le signal peut être considérablement affecté par des changements de direction de la cible, par la pluie, par des nuages, etc. Étant donné que le principe même est basé sur les variations d'amplitude du signal reçu, de telles sources d'erreur affectent considérablement la précision du système.