Maître-oscillateur
Dans un radar cohérent, toutes les fréquences internes utilisées sont des harmoniques les unes des autres, ou ont un déphasage entier les unes des autres, car elles proviennent toutes d’un même maître-oscillateur (ou oscillateur-pilote). Celui-ci alimente les oscillateurs locaux à faible bruit et les horloges du système.
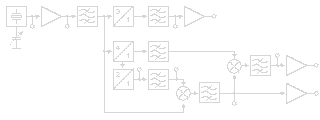
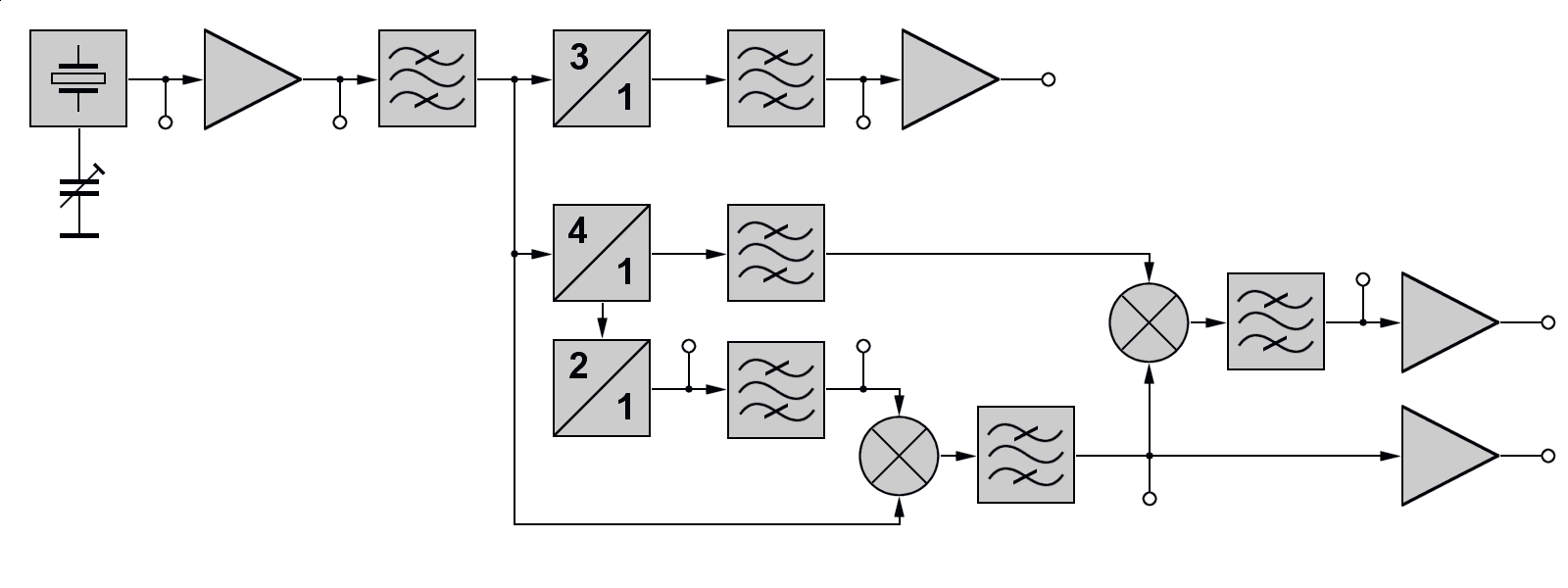
La figure montre le diagramme d’un circuit électronique typique d’un maître-oscillateur et des oscillateurs dérivés, à chaque fois donnant un exemple des fréquences mixtes produites. Les deux fréquences sont nécessaires dans un radar à diversité de fréquences pour le détecteur synchrone et le récepteur superhétérodyne (normalement obtenus par un oscillateur local).
ajustement fin
Bild 1: Taktgenerator für Masterclock und Frequenz-Ableitungen für Demodulation und Exciter.
60 MHz
ajustement fin
82,5 MHz
67,5 MHz
Figure 1 : Générateur de l’horloge maîtresse et des fréquences harmoniques pour la démodulation et l’excitateur.
60 MHz
ajustement fin
82,5 MHz
67,5 MHz
Figure 1 : Générateur de l’horloge maîtresse et des fréquences harmoniques pour la démodulation et
l’excitateur.
(S.V.P, cette image doit être imprimée en orientation paysage)
Les deux fréquences, 67,5 MHz et 82,5 MHz, sont nécessaires pour la conversion des fréquences intermédiaires vers la bande de base plus basse. Les signaux vidéo des échos radar sont produits lors de cette conversion.