Multilatération
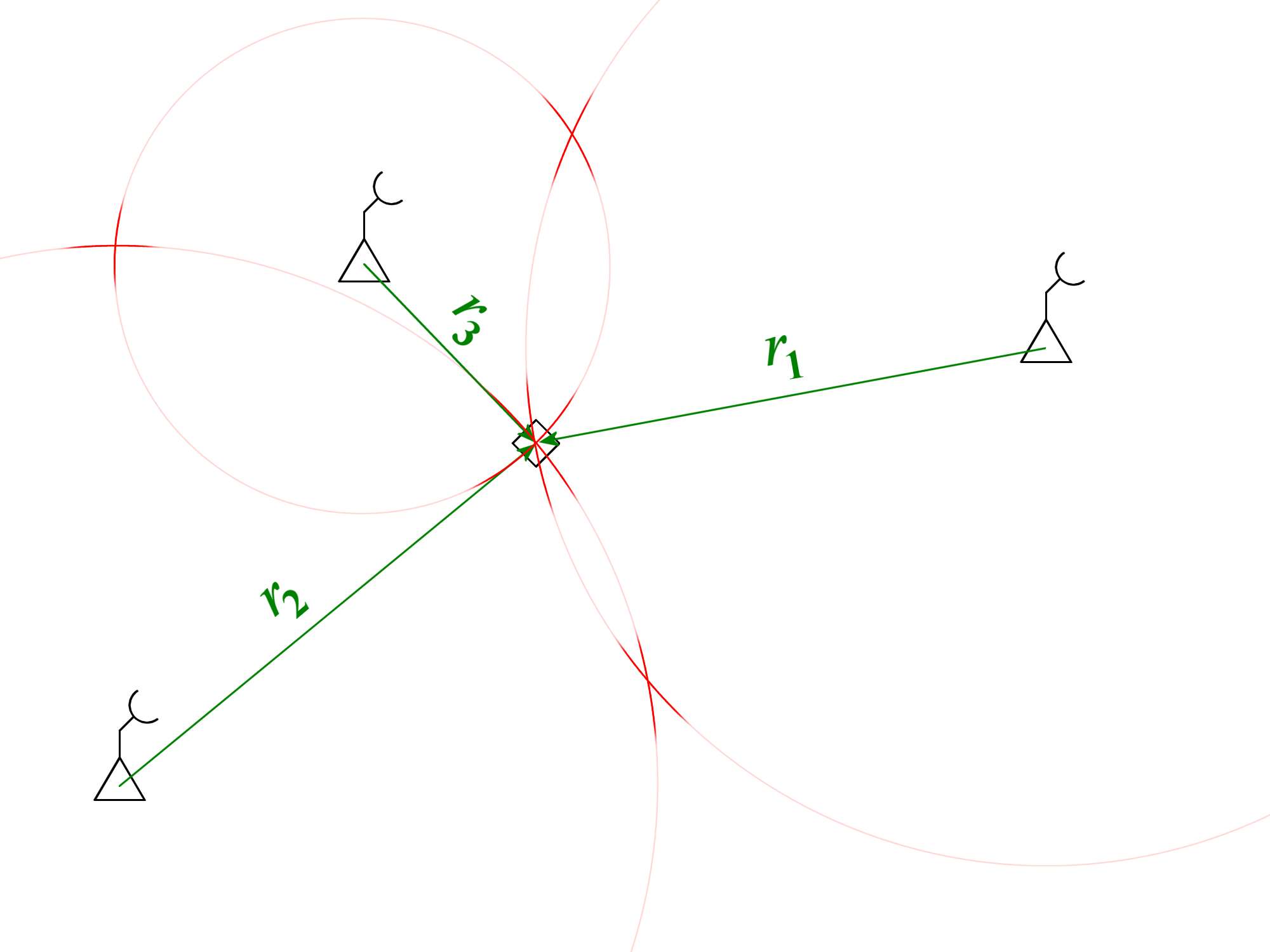
Figure 1 : Diagramme de multilatération :
ici un cas avec trois récepteurs où le point de rencontre des trois cercles de distances de chaque récepteur individuel donnent la position de la cible.
Figure 1 : Diagramme de multilatération :
ici un cas avec trois récepteurs où le point de rencontre des trois cercles de distances de chaque récepteur individuel donnent la position de la cible.
Multilatération
La multilatération est le processus qui consiste à déterminer l'emplacement de cibles en mesurant leur distance par rapport à des points connus. Dans la gestion du trafic aérien, la mesure des distances est effectuée par différentes méthodes radar par des dispositifs installés à ces points connus. Contrairement à la triangulation, il ne s'agit pas de mesurer des angles. C'est pourquoi de grandes antennes directionnelles ne sont pas nécessaires.
Fonctionnalité
Mesures synchrones dans le temps
L'objet à mesurer est irradié (par un radar primaire) ou émet un signal sur demande (par radar secondaire). Ce signal d'écho ou de réponse est reçu par un récepteur fixe utilisant une antenne omnidirectionnelle. Le délai de réception après le sondage est une mesure de la distance. Comme la détermination de la direction n’est pas encore possible, la cible est située quelque part autour du récepteur le long d’un cercle dont le rayon est la distance mesurée.
Le même processus utilisant un deuxième récepteur donne un second cercle autour de sa position fixe. L'objet à mesurer doit être situé sur l'une des deux intersections de ces cercles. Ce résultat est encore ambigu. Un troisième récepteur obtient une troisième position de rencontre ce qui donne un résultat sans ambiguïté car trois cercles ne peuvent avoir qu'un seul point d'intersection commun.
Une synchronisation est établie au moment de l'interrogation transmise (ou de l'impulsion radar). Si chaque récepteur transmet l'interrogation elle-même, la télémétrie est simple comme avec un radar monostatique. C'est une équation avec une seule quantité inconnue qui peut être facilement résolue. Si un seul émetteur central émet l'interrogation, la mesure de la distance devient un peu plus compliquée, comme dans le cas d’un radar bistatique. Il y a maintenant deux quantités inconnues dans le calcul : la distance entre l'émetteur et l'objet (qui est alors constante pour chaque récepteur) et la distance entre l'objet et les récepteurs individuels.
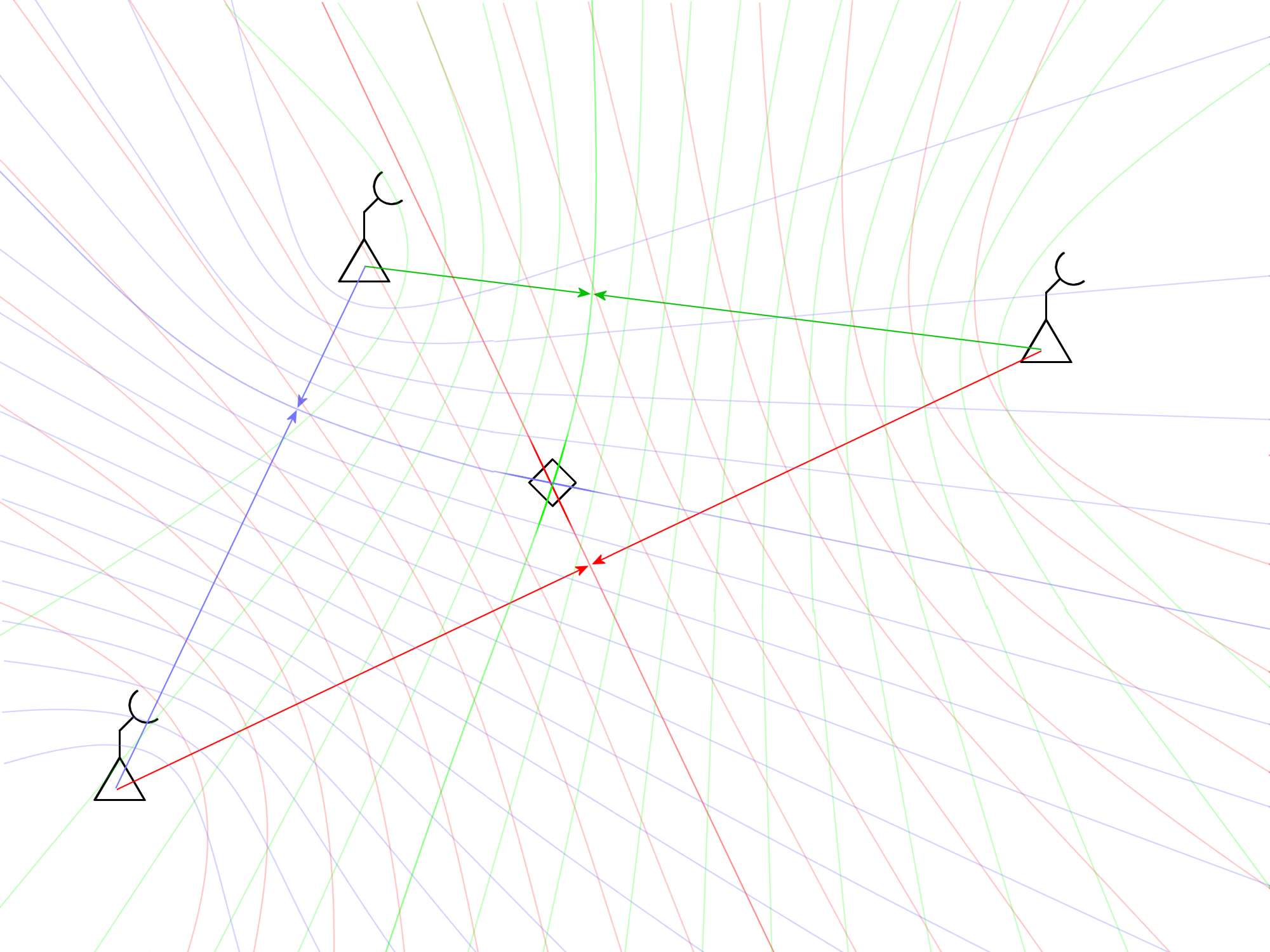
Bild 2: nichtsynchrone Multilateration, auch Hyperbelortung genannt
Multilatération non synchrone
Il est également possible que la cible transmette un message à intervalle régulier sans qu’une interrogation ne soit nécessaire (exemple: ADS-B). Ici, le temps de transmission exact est inconnu et les récepteurs ne reconnaissent que l'heure d'arrivée exacte du signal de transmission. Il n’est donc pas possible de mesurer le délai temporel entre l’objet et un seul récepteur, mais uniquement la différence temporelle du front d’onde d’un signal reçu à des sites différents (le délai supplémentaire de transit dans les câbles de connexions entre les récepteurs et le serveur du système étant connus, il peut être soustrait).
Entre deux récepteurs, les différences temporelles de réception du signal sont représentées par un groupe d’hyperboles. Chaque hyperbole de ce groupe correspond exactement à une différence spécifique. Cela signifie qu'à une différence temporelle donnée, la cible se trouve quelque part le long d’une hyperbole donnée.
D'autres paires de récepteurs mesurent également une différence d'exécution et obtiennent également une hyperbole spécifique parmi leur groupe d'hyperboles. L'intersection de toutes les hyperboles sélectionnées est la position recherchée.
Réalisation technique
Plusieurs gammes de fréquences peuvent être utilisées pour la multilatération afin de détecter des obstacles en mouvement sur les aérodromes. À cette fin, il existe un transpondeur similaire dans chaque véhicule de l’aérodrome, tel que prescrit dans les avions. Pour atténuer la congestion sur la bande 1090 MHz, la Federal Aviation Administration (FAA) a créé une autre option pour les solutions ADS-B fonctionnant sur une bande 978 MHz dédiée appelée Universal Access Transceiver ou UAT.
Les radios UAT 978 peuvent être configurées pour fournir à la fois des capacités ADS-B „Out“ et „In“ dans un seul produit. La diffusion ADS-B „Out“ sur 978 MHz transmet les mêmes données de suivi envoyées par les transpondeurs Extended Squitter (ES) sur 1090 MHz. Cependant, sur le côté „ADS-B“, la bande passante supplémentaire offerte par le spectre à 978 MHz permet une liste beaucoup plus complète de services de liaison ascendante de données.
Le système ADS-B fournit des informations sur la position des aéronefs/véhicules à l'aide des données fournies par le système de navigation GPS de l'unité et transmises via le long mode (1090 MHz) de réponse erratique ou l'émetteur-récepteur universel (978 MHz). Les autorités aéroportuaires ou les entités agréées par la FAA peuvent demander à exploiter jusqu'à 200 émetteurs erratiques de véhicules[1].
Les informations de localisation du véhicule ont désormais deux sources indépendantes : une fois le GPS intégré dans le transpondeur et la multilatération. Afin d’atténuer la congestion, la fréquence de réponse fortement utilisée du radar secondaire (1090 MHz), le GPS arrête l’ADS-B lorsque le véhicule n’est pas sur les voies de circulation ou sur la piste.
Erreurs de mesure
Par un très grand nombre de tels récepteurs, les erreurs de mesure peuvent être supprimées statistiquement. Les erreurs de mesure se produisent en particulier lorsqu'un bruit intense ou une interférence active falsifie la mesure du bord d'attaque du signal reçu. De plus, une réflexion multiple peut affecter la mesure du temps d'exécution.
Référence :
- ICAO: Airport Ground Vehicle Automatic Dependent Surveillance – Broadcast (ADS-B) Out Squitter Equipment — 14 novembre 1011, (en ligne)