Radar à forme d’onde adaptative
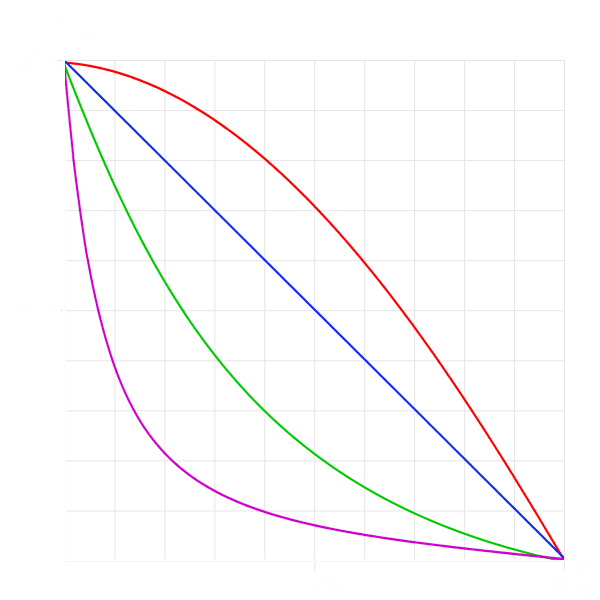
Figure 1 : Exemples de modulation de fréquence en “chirps” dans un graphique temps versus fréquence : En abscisse, le 100 % représente la longueur complète de l’impulsion ; En ordonnée, la déviation possible de la fréquence de modulation.
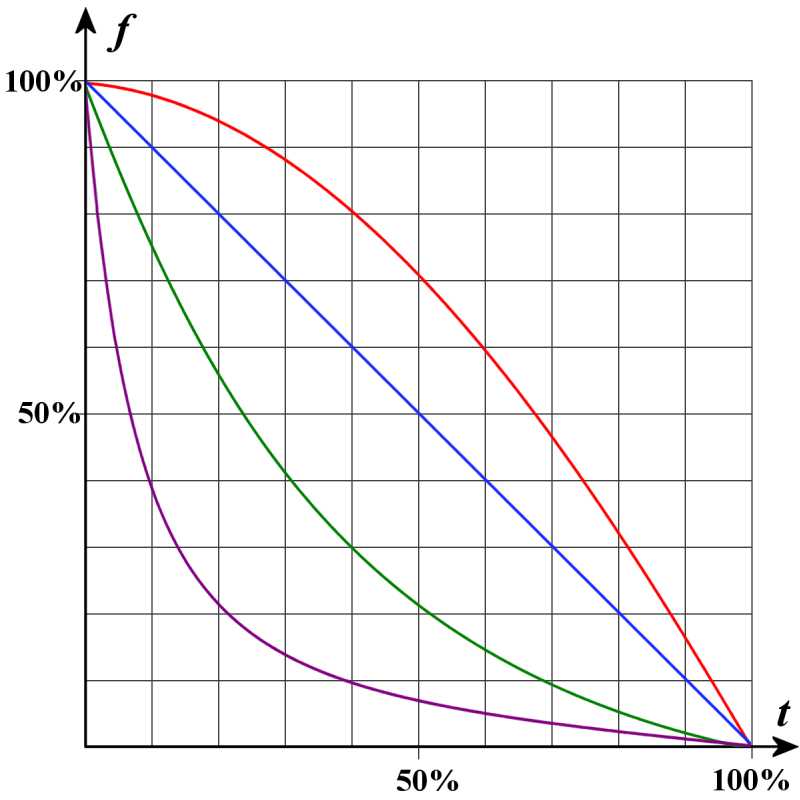
Figure 1 : Exemples de modulation de fréquence en “chirps” dans un graphique temps versus fréquence : En abscisse, le 100 % représente la longueur complète de l’impulsion ; En ordonnée, la déviation possible de la fréquence de modulation.
Figure 1 : Exemples de modulation de fréquence en “chirps” dans un graphique temps versus fréquence : En abscisse, le 100 % représente la longueur complète de l’impulsion ; En ordonnée, la déviation possible de la fréquence de modulation.
Qu'est-ce qu'un radar à forme d’onde adaptative?
Radar à forme d’onde adaptative
Certains radars permettent la modulation intra-impulsions arbitraires dans le générateur de formes d'ondes. Ainsi, il est possible d’adapter le signal émis à des conditions de fonctionnement particulières. Un tel système est appelé « transmission adaptative » s’il peut réagir en réponse aux variations de son environnement. La forme d'onde est choisie à chaque pas de temps pour optimiser les performances du radar et maximiser la probabilité de détection dans un environnement soumis à des interférences radio. Un tel système est donc appelé « radar à traitement de forme d’onde adaptative » (en anglais Waveform Agile Radar Processing ou WARP). La variation active de la forme d’onde peut améliorer les performances telles que :
- Réduction de l'erreur de poursuite des cibles ;
- Amélioration de la détection des cibles ;
- Plus grande précision dans l'identification des cibles ;
- Augmentation de l'efficacité de l'utilisation du capteur.
Lorsqu’un radar transmet un signal électromagnétique dans l’espace l’entourant, un volume de résolution sondée peut contenir deux objets d'intérêt (cibles) et des échos sans intérêt, connus comme le fouillis radar (échos de sol, précipitations, etc.), et des >interférences radio. Pour un tel environnement, le signal émis peut être choisi de façon optimale afin qu’un filtre adapté les éliminent dans le récepteur pour produire une détection des cibles avec une probabilité plus élevée qu’avec une forme d’onde invariante.
La figure 1 représente une modulation de fréquence descendante en fonction du temps pendant l’émission d’une impulsion intra-modulée (la modulation descendante donne une l'image miroir de ce graphique). La modulation de fréquence linéaire (MFL), une forme de compression d'impulsions, est représentée en bleu. La courbe est rouge, appelée modulation de puissance ou MFP, peut prendre différentes formes mais celles-ci doivent être mathématiquement correctes afin de réaliser efficacement la compression d'impulsions. Pour les modulations exponentielles (MFE) et hyperboliques (MFH), cette dépendance mathématique est définie par leur nom.
Afin de détecter une cible dans un environnement avec un fouillis et des interférences extrêmes, plusieurs formes d'onde peuvent être transmises en même temps. La compression d'impulsion suit alors une logique sélective (« le plus grand de … ») qui choisit la forme d'onde qui a le meilleur rapport signal sur fouillis.
Référence :
Sandeep P. Sira, Antonia Papandreou-Suppappola, and Darryl Morrell:
Dynamic Configuration of Time-Varying Waveforms for Agile Sensing and Tracking in Clutter
(résumé)
IEEE TRANSACTIONS ON SIGNAL PROCESSING, Vol. 55, No. 7, juillet 2007, p. 3207