Solution de Dicke
La solution de Dicke est spécialement conçue pour protéger le récepteur contre les suroscillations provenant du bruit, du balayage rapide ou du brouillage par impulsion étroite. Elle fut développée par Robert Dicke, un chercheur au Centre de recherches sur les télécommunications de la défense (CRTD) d’Ottawa, Canada et publié en 1960. Elle était utilisée dans les systèmes de défense aérienne comme le radar MPR.
Le terme solution indique qu’il s’agissait de la réponse rapide à un problème rencontré à ce moment-là. Cette technique a été remplacée par des techniques plus élaborées depuis ce temps. Aujourd’hui la solution de Dicke n’est plus utilisée sur les radars récemment construits, en particulier ceux à traitement du décalage Doppler-Fizeau, et n’est donc présenté que pour son intérêt historique car certains vieux radars encore en service peuvent en être munis.
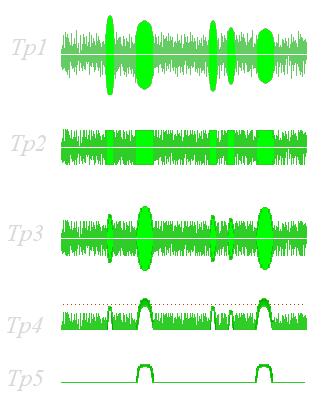
Figure 1 : Diagramme d’un circuit utilisant la solution de Dicke par amplification de la fréquence intermédiaire.
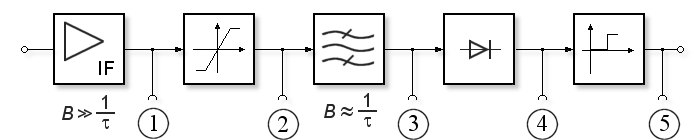
Figure 1 : Diagramme d’un circuit utilisant la solution de Dicke par amplification de la fréquence intermédiaire.
{kind=link}
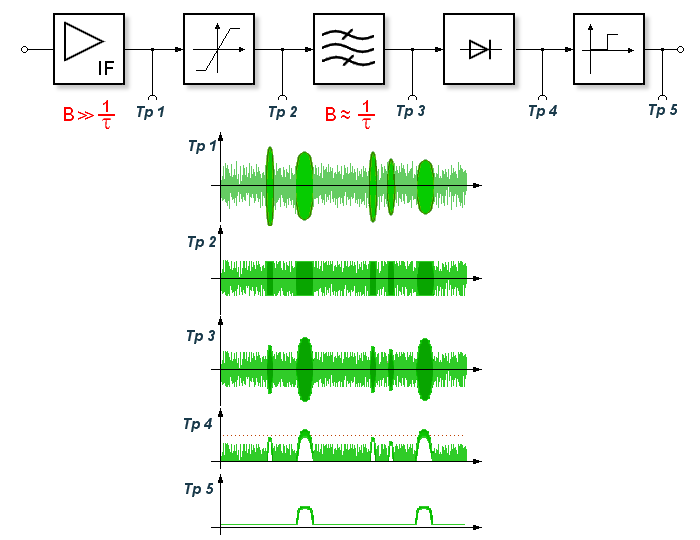
Figure 1 : Diagramme d’un circuit utilisant la solution de Dicke par amplification de la fréquence intermédiaire. (Voir les sorties de l’oscilloscope virtuel en passant la souris sur les points d’échantillonnage TP1 à TP5.)
Interférences
Figure 2: Diagrammes mesurés dans le schéma de bloc
Cette technique de traitement des échos radars s’utilise après la transformation à la fréquence intermédiaire (IF). La figure 1 montre la suite de composantes électroniques utilisées et par lesquelles le signal arrivant à gauche passera :
- Un amplificateur à large bande passante ;
- Un limiteur ;
- Un amplificateur dont la bande passante de fréquences est ajustée à celle de la longueur de l’impulsion radar utilisée ;
- Un rectificateur ;
- Un filtre d’intensité.
L’amplificateur à large bande passante augmente l’intensité de toutes les composantes de celui-ci (écho réel, bruit et brouillage). Le limiteur coupe ensuite les amplitudes de toutes les composantes du signal à un seuil déterminé.
Le signal contenant les vrais échos est corrélé aux fréquences contenues dans l’impulsion envoyée par le radar et que l’on peut connaître par transformée de Fourier de celle-ci (ex. une onde carrée est approximée par un sinus de même longueur d’onde que la longueur que l’impulsion au premier degré). En utilisant un amplificateur ajusté, le signal correspondant à ces fréquences sera plus intensifié que les autres composantes. Ensuite, le signal passe par un rectificateur qui ne garde que la portion positive de celui-ci.
Finalement, un filtre ne garde que les intensités au-dessus d’un certain niveau correspondant au seuil des signaux moins amplifiée antérieurement. Ceci rejette donc les impulsions trop longue (échos parasites ou fouillis) et trop courte (interférences).
Le seuil préétabli du circuit se situe environ à l’amplitude maximale du bruit de fond du récepteur et sa bande passante peut varier de 10 à 20 MHz, selon le brouillage présent. Ceci cause un taux de fausses alarmes constant sur une grande plage du balayage. Le traitement des données radar par la solution de Dicke permet d’amenuiser le brouillage produit, souvent de l’ordre de 20 à 40 dB, par un émetteur balayant rapidement une large gamme de fréquences (10-500 MHz) sans perte appréciable du signal.
Cependant, cette technique n’est pas efficace pour un brouillage à onde entretenue de forte intensité ou à balayage lent de fréquences parce que son signal se superpose à la fréquence de l’impulsion dans le récepteur.