Synchros

Figure 1 : Un synchro ressemble à un très petit moteur électrique triphasé.

Synchros
Le terme synchro est une abréviation de capteur synchrone. Il s’agit d’un type de capteur de position par la rotation d’un élément électromécanique. Cette appareil ressemble à un petit moteur électrique triphasé et opère comme un transformateur de tension variable.
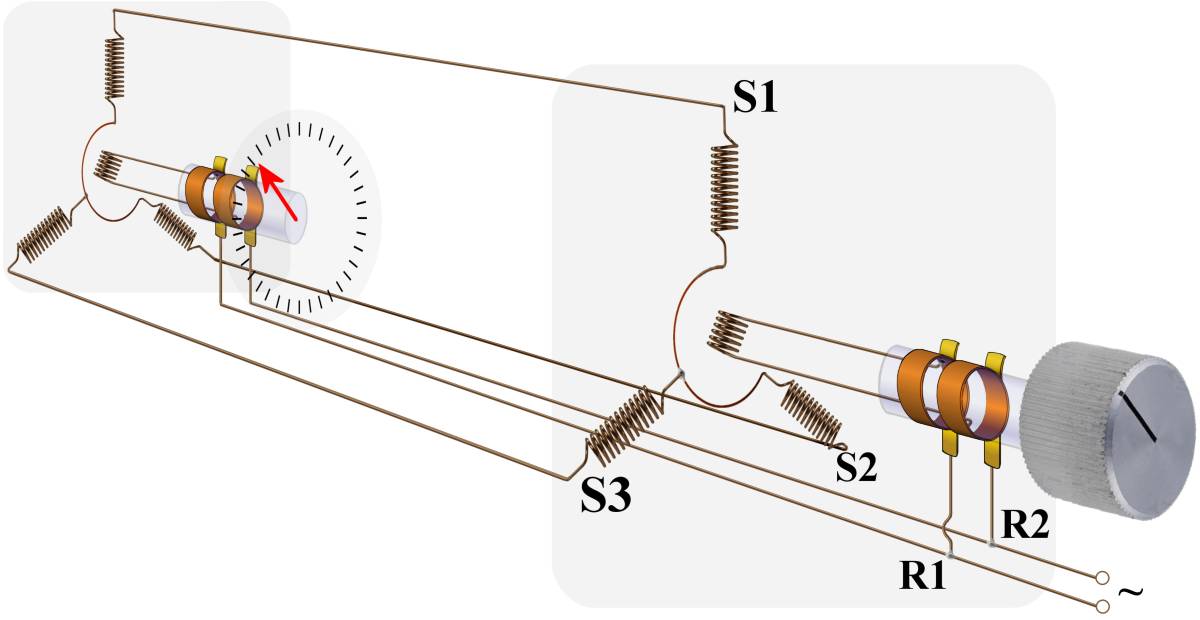
Figure 2 : Principe de l’utilisation du couple dans un synchro.
Les synchros contiennent un rotor, similaire à l’armature dans un moteur, et un stator qui donne la valeur du champ magnétique dans l’appareil. Le rotor contient un bobinage, le primaire. Le stator contient un bobinage triphasé, le secondaire.
L'enroulement du stator triphasé est alimenté par des tensions alternatives sinusoïdales (en général de 50 ou 400 Hz) aux trois bornes espacées de 120 degrés autour de l’axe. Les amplitudes des 3 tensions du stator définissent l'angle électrique appliqué ce qui force le rotor à tourner car son champ magnétique, alimenté par la même source, doit s’aligner dans le même axe.
Lorsque l'angle mécanique du rotor est égal à l'angle électrique, la tension aux bornes du rotor devient nulle et le rotor se stabilise dans la position désirée. Plus le courant dans les bornes des stators est grande, plus le couple exercé est grand et donc peut tourner une masse importante.
Le synchro de couple est un appareil de faible puissance qui transmet la position d’un appareil à un indicateur de contrôle. Il sert donc à tourner l’aiguille sur un cadran ou de tout afficheur similaire. Il est en général alimenté par une basse tension comme 110 volts.
Le synchro de contrôle est un système similaire au précédent, mais plus puissant, utilisé pour tourner des appareils massifs tels les canons anti-aériens, les antennes radar et les pas de tir de missiles. Les systèmes de servo-contrôle qui utilise ce type de synchro comportent un servo-moteur, un amplificateur de servo-moteur, un transmetteur de synchro-détection et un transformateur de commande.
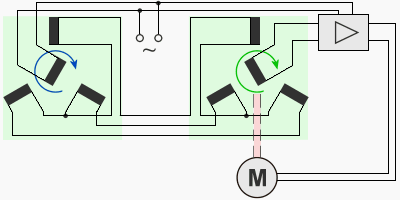
Figure 3 : Commande typique de rétroaction électromécanique d’un système servo.
Le servo-moteur tourne la charge à la position approximative donnée par le synchro. L’erreur sur la direction est amplifiée par l’amplificateur ce qui crée une rétroaction sur le synchro qui envoie une commande de correction au servo-moteur. Le cycle se répète jusqu’à ce que la bonne la charge soit dans la position exacte.
Si les données transmises ne couvrent qu’une plage limitée de valeurs, un appareil à vitesse unique est suffisant. Cependant, lorsque la plage s’accroit et que la précision demandée est grande, il faut utiliser un système à vitesses multiples (1 à 36 fois la vitesse de base) ou à double vitesse pour l’ajustement fin. Un synchro à deux vitesses de rotation (rapide et lente) consiste en deux transmetteurs et deux récepteurs qui s’occupent chacun d’une vitesse (ajustement grossier et fin).
Résolveur
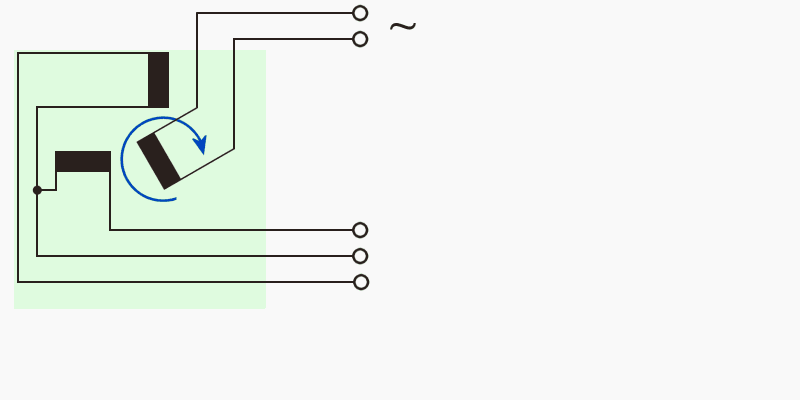
Figure 4 : Résolveur
D’autres utilisations nécessitent un résolveur, une unité fonctionnelle ayant comme variables analogiques d'entrée les coordonnées polaires d'un point et comme variables analogiques de sortie les coordonnées cartésiennes de ce même point, ou vice-versa.
De l'extérieur, un résolveur ressemble à un synchro mais à l'intérieur, les arrangements sont différents. Le rotor comporte généralement le bobinage primaire. Le stator comporte alors les deux bobinages secondaires (bobinage diphasé, c'est-à-dire décalés de 90° électriques). Il fonctionne comme un transformateur dont le couplage varie avec l'angle mécanique du rotor. Lorsqu'on excite le bobinage rotor avec une tension alternative on récupère deux tensions alternatives sur les bobinages secondaires.
Un résolveur est utilisé, entres autres, dans l’affichage sur un PPI où il permet un calcul analogique de la position trigonométrique d’un écho à l’écran lors du balayage. Ces appareils sont également utilisés dans les ordinateurs analogiques, les radars et les systèmes de pointage.