Affinement Doppler du faisceau
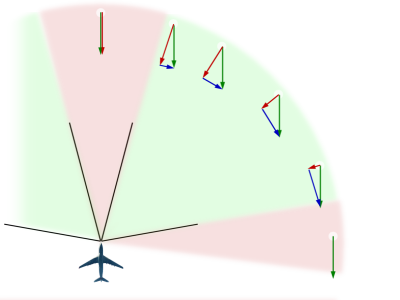
Figure 1 : Efficacité par secteur avec la technique de l’affinement par faisceau Doppler
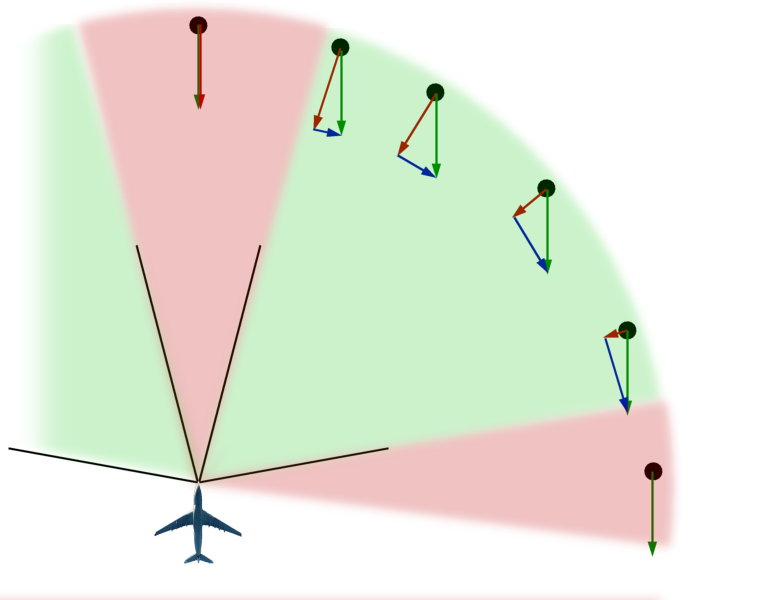
Figure 1 : Efficacité par secteur avec la technique de l’affinement par faisceau Doppler
Figure 1 : Efficacité par secteur avec la technique de l’affinement par faisceau Doppler
Affinement Doppler du faisceau
L’affinement par faisceau Doppler est une méthode de traitement du signal rétrodiffusé des radars aéroportés en une image à plus haute résolution. Elle utilise l’information Doppler contenu dans le signal revenant des cibles pour donner une meilleure résolution latérale que la résolution propre à l’antenne.
Le terme lui-même a pris deux sens différents dans l’histoire du radar. Initialement, Carl Wiley de la compagnie Goodyea, a donné en 1951 ce nom à ce qui deviendra le principe du radar à synthèse d’ouverture: un système qui analyse les retours successifs des échos venant d’un sondage aérien pour leur variation Doppler. Maintenant, ce nom désigne un affinement de la position angulaire de cibles autour d’un avion pour l’affichage sur PPI. Il s’agit là d’une application de la variation de fréquence Doppler selon l’angle de visée dans un sondage unique. Durant les années 1970, le radar AN/APG-66 de la compagnie Westinghouse, monté sur les premiers modèles du chasseur F–16, fut l’un des premiers à offrir ce traitement.
Le principe de l’affinement Doppler peut se définir ainsi: l’antenne d’un avion est relativement petite et sa résolution angulaire est donc faible mais à l’intérieur de la cellule de résolution, les cibles ont chacune un déphasage Doppler qui dépend de l’angle de visée ce permet d’affiner leur position angulaire. Par exemple, un avion de chasse moderne a une antenne radar de diamètre de 40 cm ce qui donne une résolution angulaire de 4 degrés mais il peut grâce à ce traitement obtenir une résolution de 0,5 degré.
En effet, le radar cohérent utilise une faible fréquence de répétition des impulsions qui permet d’obtenir la composante radiale du déplacement entre l’avion et les cibles. Cette composante est égale au cosinus de l’angle entre la direction de déplacement de l’avion et celle de la cible. Dans la figure, on peut voir que la composante varie peu lorsque qu’on est près de la direction de déplacement de l’avion, quelle est notable au-delà de 15 degrés de cette direction puis devient nulle à 90 degrés de la direction de déplacement.
Donc une cible se trouvant à l’intérieur du faisceau de faible résolution angulaire aura une composante radiale différente selon son angle exact par rapport au déplacement de l’avion dans les zones vertes. Par exemple, une cible à 20 ou à 22 degrés sera perçue dans le même faisceau ayant une largeur de 4 degrés, disons à une position entre 18 et 24 degrés, mais la vitesse radiale sera différente selon l’angle. Le logiciel du système radar traitera cette donnée supplémentaire et pourra donc donner une position plus précise sur l’affichage PPI, malgré la faible résolution initiale.