Schéma fonctionnel universel du radar pulsé
Figure 1 : Schéma fonctionnel universel du radar pulsé.
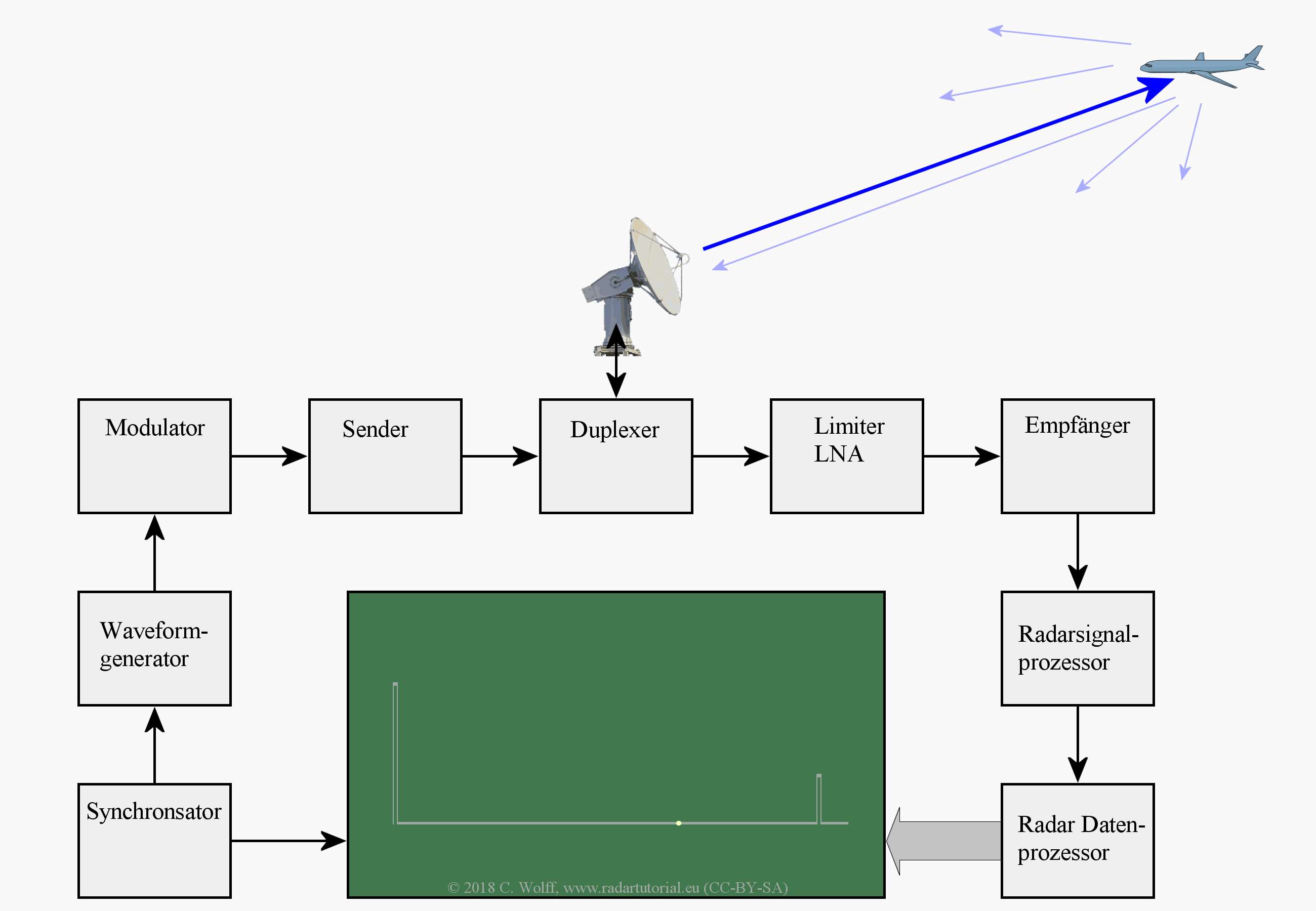
Figure 1 : Schéma fonctionnel universel du radar pulsé.
Figure 1 : Schéma fonctionnel universel du radar pulsé. (Image interactive)
Ce diagramme peut être utilisé pour vos propres leçons, mais une capture de l’image ne comporte pas d’étiquettes ni d'image de fond (paysage), juste les boîtes et les animations.
Des étiquettes dans votre propre langue peuvent être placées en utilisant un programme comme MS-.
Pour une présentation avec un arrière-plan clair, vous pouvez utiliser l'animation suivante :
pulseradar-bright.gif (940×650px, 683 koctets).
{kind=link}
Description des modules du schéma fonctionnel
Synchroniseur
Le synchroniseur radar alimente tous les horodateurs, les impulsions de déclenchement et les commutateurs avec l'impulsion de déclenchement de l'émetteur. Il détermine le point de départ de l'émission de l'onde radar.
Générateur d'onde
Dans les radars modernes, le générateur de signaux génère un signal complexe de fréquence intermédiaire, incluant la durée de l'impulsion. Dans les premiers radars pulsés, il était intégré dans le modulateur en tant que réseau de formation d'impulsions.
Modulateur
Dans les radars modernes, le modulateur convertit l'onde de l'émetteur à la fréquence porteuse de l'émetteur. Dans les radars plus anciens, il produisait uniquement une impulsion haute tension de longueur définie en variant la tension anodique du tube émetteur auto-oscillant.
Émetteur
L'émetteur génère l'énergie de l'impulsion radar. Des formes d'onde complexes sont amplifiées à la puissance nécessaire dans un amplificateur de haute puissance alors que des impulsions simples non modulées, de type ON/OFF, furent générées dans un tube de haute puissance auto-oscillant comme un magnétron.
Duplexeur
Der Duplexer ist ein Sende-Empfangs-Umschalter. Le duplexeur est un commutateur d'émission-réception. Il laisse passer l'impulsion vers l’antenne durant émission, tout en évitant que le signal n’atteigne le très sensible récepteur, et laisse ensuite les échos de retour passer de l’antenne au récepteur avec le moins de perte possible.
Contrôle temporel de sensibilité
Le contrôle temporel de sensibilité est un contrôle de gain du signal dépendant du temps. Dans la zone proche de couverture radar, les échos sont très forts, il suffit donc d'un petit gain. À de grandes distances, les signaux d'écho sont extrêmement faibles, le gain doit être réglé au maximum. Afin de ne pas saturer le récepteur, cet ajustement doit être fait le plus tôt possible dans la gamme des hautes fréquences. Dans la plupart des cas, un limiteur supplémentaire est intégré pour protéger les étages sensibles du préamplificateur à faible bruit dans le récepteur.
Récepteur
Le récepteur convertit les signaux de haute fréquence en une fréquence intermédiaire (FI) plus facile à traiter. À cette fréquence, seule la partie contenant les informations de l’écho est extraite. Afin d'obtenir la meilleure plage dynamique possible, la plupart des amplificateurs sont logarithmiques.
Processeur de signal radar
Le processeur de signal radar traite les échos en temps réel. Ils peuvent déjà être numérisés à ce niveau mais sont toujours dans un rapport temporel fixe par rapport à l'impulsion transmise. De nombreux filtres peuvent être utilisés en parallèle à partir desquels le signal de sortie est celui donnant le plus grand rapport signal sur bruit. Pour un traitement ultérieur le nom du filtre utilisé doit être transmis car il s'agit d'un facteur important dans l'identification de la cible.
Processeur des données radar
Le processeur de données radar ne traite que la transformation numérique de l'écho. Comme les traitements de différentes longueurs n'ont pas de relation fixe avec l'impulsion de l'émetteur, ces données ne sont plus en temps réel. À cette fin, l'ensemble de données a reçu un horodatage au début du traitement de sorte que les données peuvent être affichées selon leur référence temporelle correcte.
Affiche radar
Une variété de dispositifs permettent de visionner les échos radar. L’exemple ici est celui d’un oscilloscope analogique simple de type A. La déviation linéaire en X représente la distance radar-cible et elle est déterminé par le temps de propagation des ondes électromagnétiques aller-retour à celle-ci. La détection et l’intensité de l’écho est la position du début de la déviation verticale. Les retards dus à la période d’émission dans les circuits internes de l'oscilloscope sont compensés.