Détecteur de cibles
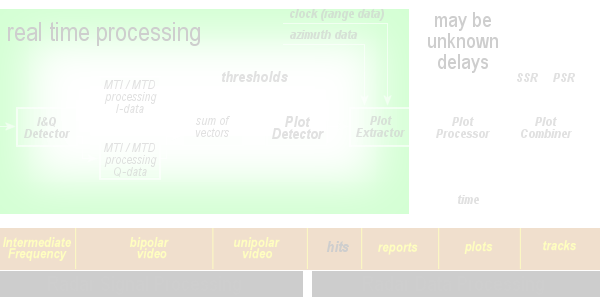
Figure 1 : Flux de l’information dans un processeur radar
de phase
I&Q
tratement
du signal I
tratement
du signal Q
de
CORDIC
d’échos
des échos
de
trajectoire
sources
SSR et PSR
intermédiaire
bipolaire
unipolaire
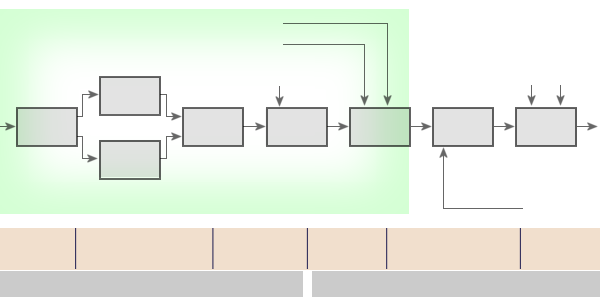
Figure 1 : Flux de l’information dans un processeur radar
de phase
I&Q
tratement
du signal I
tratement
du signal Q
de
CORDIC
d’échos
des échos
de
trajectoire
sources
SSR et PSR
intermédiaire
bipolaire
unipolaire
Figure 1 : Flux de l’information dans un processeur radar
Détecteur de cibles
Le signal de sortie du récepteur, qui contient les cibles et différents artefacts, passe dans le détecteur de phase pour en tirer les composantes I et Q qui seront traitées séparément. Par la suite, le traitement de visualisation des cibles mobiles (VCM) applique un premier filtre pour éliminer ces artefacts mais il peut en demeurer une partie pour différentes raisons comme une instabilité dans le circuit électronique, une modulation du signal provenant de l’antenne, un problème d’étendue dynamique traitable ou la présence de vitesse radiale Doppler de certains échos parasites (comme les précipitations).
Le diagramme montre la position du détecteur dans la chaîne de traitement des échos radars. À la sortie de l’algorithme de CORDIC, la donnée analogue originale a été numérisée mais n’est encore classée que dans une suite continue de « cases », identifiée comme venant de l’azimut a et la distance X. Comme ils gardent certains artefacts, le détecteur filtre les données grâce à des seuils, ne laissant passer que les échos qui dépassent ceux-ci et donc élimine encore plus de faux échos, provenant du fouillis radar, à un taux de fausses alarmes constant.
Le détecteur termine sont travail en assignant des coordonnées et caractéristiques d’intensité aux « vrais » échos obtenus. Cependant, plusieurs échos concomitants peuvent appartenir à la même cible. La tâche de rassembler ceux-ci en une seule entité se fait à l’étape suivante de la chaîne.