Radar à synthèse d’ouverture non linéaire
un décalage transversal
au centre de la scène
centre de la scène
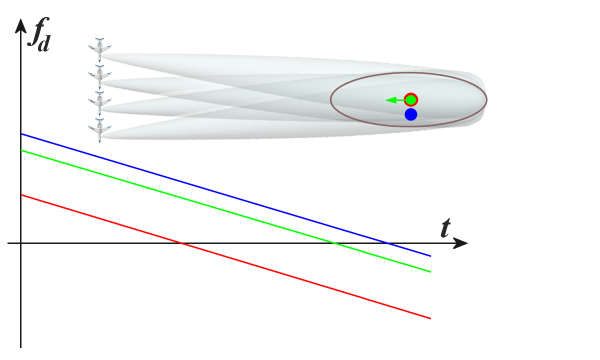
Figure 1 : Historique de la fréquence Doppler dans un RSO linéaire (conventionnel) en mode de saisie hyperfine
un décalage transversal
au centre de la scène
centre de la scène
Figure 1 : Historique de la fréquence Doppler dans un RSO linéaire (conventionnel) en mode de saisie hyperfine
Radar à synthèse d’ouverture non linéaire
Le sondage normal d’un radar à synthèse d’ouverture nécessite que le porteur du radar se déplace le long d’une trajectoire linéaire, à vitesse et altitude constantes. La technique du RSO non linéaire permet de dépasser ces limitations en notant la position exacte du porteur, quelque soit sa trajectoire, et en utilisant un calcul pour séparer les effets de la vitesse radiale de la cible et de son décalage transversal par rapport au radar.
Même dans un RSO conventionnel, une unité de mesure inertielle permet de détecter toute déviation de phase au centre de l’antenne par rapport à la trajectoire linéaire idéale ce qui permet d’introduire une correction de phase inverse aux signaux reçus de la cible. Cette correction est normalement appliquée à toutes les impulsions reçues pour éliminer la pente de l’évolution du décalage Doppler dans un processus appelé focalisation. Le décalage Doppler est normalement interprété par le RSO comme un déplacement dans la direction transversale et si la correction n’est pas faite, la cible sera positionnée au mauvais endroit dans l’image synthèse du radar. Cette distorsion est appelée ambiguïté en azimut. Elle peut souvent être corrigée en entrelaçant l’analyse avec le mode Éliminateur d’échos fixes au sol qui détecte et localise les cibles mobiles.
au centre de la scène
un décalage transversal
centre de la scène
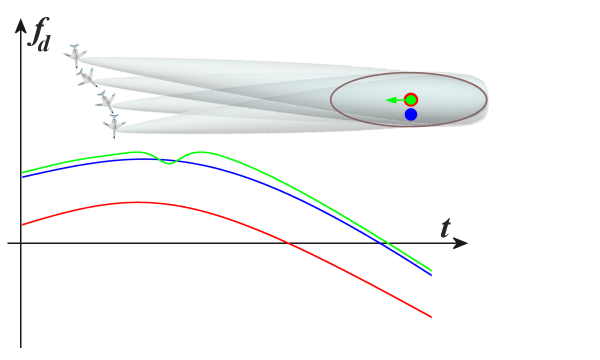
Figure 2 : Évolution du décalage Doppler dans un RSO non-linéaire en mode de saisie hyperfine
au centre de la scène
un décalage transversal
centre de la scène
Figure 2 : Évolution du décalage Doppler dans un RSO non-linéaire en mode de saisie hyperfine
En sondage non-linéaire, l’unité de mesure inertielle note la trajectoire du porteur-radar et cette information est utilisée pour générer, pixel par pixel, une série évolutive des phases possibles des données. Chaque série correspond à une vitesse radiale probable d’une cible dans le pixel. Ces divers scénarios sont ensuite comparés au signal rétrodiffusé par la cible pour en extraire la meilleure phase de correction.
L’utilisation d’une trajectoire non-linéaire, planifiée ou non, est le plus souvent reliée au travail de reconnaissance d’un avion appareil militaire en territoire hostile. Il permet d’accroître ses chances de survie tout en donnant une image de haute résolution des cibles fixes et mobiles, en plus d’éliminer les distorsions associées au RSO conventionnel. La conformation du faisceau doit être adapté aux manœuvres de l’appareil et au mode de sondage: en bande, saisie hyperfine et à balayage.