Affichage PPI
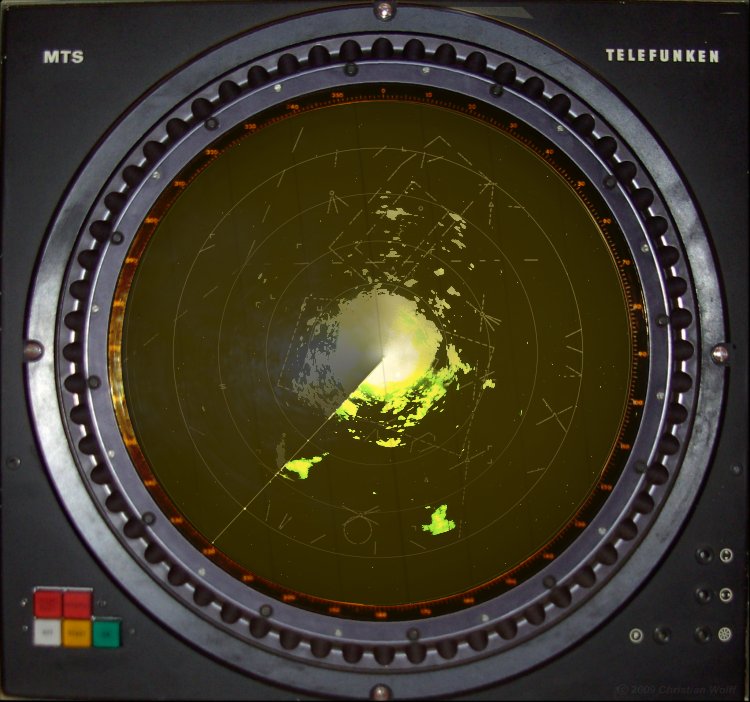
Figure 1 : Affichage PPI

L’affichage PPI utilise un balayage radial pivotant autour du centre de l’image. Ceci donne une image cartographique de la région de couverture du radar. On utilise un écran à longue persistance des pixels pour que les cibles demeurent visibles entre chaque balayage.
L’azimut à la cible est indiqué par la position angulaire par rapport à une ligne imaginaire allant du centre de l’écran vers le haut de l’affichage. Sur la plupart des écrans, cette direction de référence est le nord vrai (mode géographique). Sur un navire, la direction de référence est plutôt la direction de déplacement à moins qu’on soit en mode géographique.
synchroniseur
la direction
focalisation
déviation
porte
contrôle de
balayage
d’alimen-
tation
Bild 2: Blockschaltung eines Rundsichtgerätes (PPI)
synchroniseur
la direction
focalisation
déviation
porte
contrôle de
balayage
d’alimen-
tation
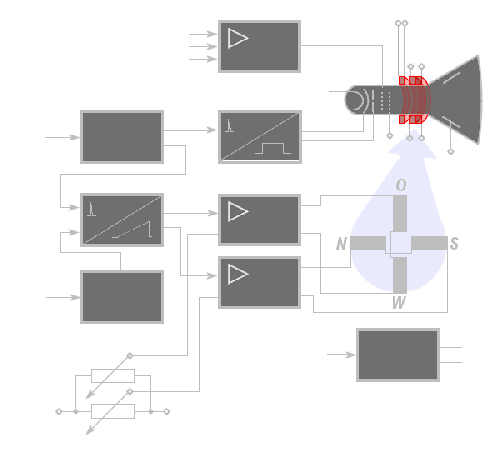
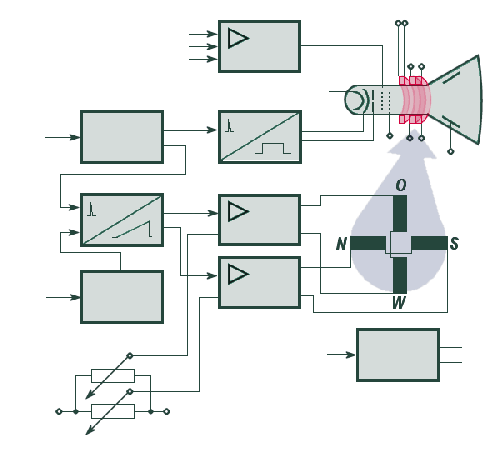
Figure 2 : Diagramme des composantes d’un affichage PPI
synchroniseur
la direction
focalisation
déviation
porte
contrôle de
balayage
d’alimen-
tation
Figure 2 : Diagramme des composantes d’un affichage PPI (Image interactive)
Circuit-porte
Le circuit-porte est ouvert par un signal provenant d’un synchroniseur. Il émet alors une impulsion qui synchronise le balayage sur l’écran et celui du transmetteur. L’impulsion déclenche ainsi le processus qui change l’intensité du générateur de porte, du générateur et du contrôle de balayage. Certains affichages anciens utilisent un signal venant du modulateur (ex. le synchroniseur de l’ASR–910 génère un déclencheur pour l’affichage PPI TA-39).
Générateur d’impulsion d’encadrement
Le générateur d’impulsion d’encadrement émet une onde carrée vers la ou les grilles de contrôle, ce qui laisse le passage ouvert au faisceau vers l’écran durant le temps de balayage. Lorsque l’onde est terminée, la grille arrête le faisceau ce qui permet au système de déflexion de retourner à l’origine sans que des électrons ne tracent une ligne à ce moment. L’intensité de la trace sur l’écran dépend du courant continu de l’onde. Le générateur est aussi synchronisé avec le balayage initié par le circuit-porte.
Amplificateur vidéo
L’amplificateur vidéo augmente le signal vidéo venant du récepteur et l’envoie à l’élément de modulation d’intensité de l’écran. À ce point, il est important de prévoir un ajustement entre le contraste et la luminosité. La luminosité de l’arrière-plan, indiquant l’azimut et les cercles de distance, doit être ajustée à un niveau relativement bas pour ne pas cacher la détection de cibles.
Circuit de contrôle du balayage
Pour synchroniser le balayage avec celui de l’antenne, l’information sur l’azimut (angle de direction) doit être convertie en tension électrique. Cette dernière, habituellement fournie par le synchro du moteur de l’antenne, contrôle l’amplitude et la polarité d’un courant en dents-de-scie qui est appliqué à des bobines de déviation verticale et horizontale dans le tube cathodique. L’amplitude des courants en dents-de-scie varie sinusoïdalement et correspond à la rotation de l’antenne.
Figure 3 : Un générateur de rampe fournit une tension en « dents de scie » dans un générateur de base de temps
Générateur de base de temps
Le balayage se fait grâce à une déviation des électrons dans le tube cathodique vers la position azimut/distance des signaux reçus en variant la tension dans des bobines d’induction perpendiculaire au faisceau. Une rampe de voltage en dents-de-scie est nécessaire à la production d’un tracé linéaire. Le tout est coordonné par le circuit du générateur de base temps. La pente de la rampe distance versus voltage jusqu’au voltage maximal détermine le taux de balayage et donc la distance maximale couverte par chaque balayage.
Figure 4 : Balayage avec des bobines fixes.
{kind=link}
{kind=link}
L’amplitude maximale de la rampe pour déviation du faisceau d’électrons dans le tube cathodique dépend du voltage appliqué. En fait, il y a une déviation verticale et une autre horizontale qui sont appliquées pour créer un balayage en deux dimensions Verticalement, l’évolution du voltage est le sinus de la position azimut/portée et horizontalement, c’est le cosinus. La coordination de la déviation produite par les bobines d’induction, l’une créant un champ magnétique vertical et l’autre un champ horizontal, se fait comme dans la figure 4.
Tube cathodique
Tous les tubes cathodiques ont trois éléments principaux: le canon à électrons, le système de déflexion et l’écran. Le canon à électrons produit un faisceau d’électrons très focalisé et continu. Les électrons sont émis par un filament chauffant et accélérés par la différence de potentiel électrique vers une anode, le tout en direction de l’écran. La focalisation se fait par des anodes supplémentaires et des grilles de contrôle qui créent un champ électrostatique. Différents systèmes permettent de le dévier afin qu’il frappe l’écran à la position voulue où il excitera le revêtement phosphorescent, laissant un point brillant.
Il y a deux principaux systèmes de déviation du faisceau d’électrons:
- Contrôle électrostatique;
- Contrôle électromagnétique.
Le premier utilise un champ électrique après la sortie du canon à électrons pour effectuer le changement de trajectoire alors que le second utilise un champ magnétique créé par des bobines d’induction. Les deux types de tube cathodiques se ressemblent de l’extérieur mais le contrôle électromagnétique permet de plus grande déviation du faisceau, donc de plus larges écrans.
Un affichage PPI utilise un écran ayant une couche de phosphore ou de terres rares permettant une longue persistance des « points » excités, afin qu’ils soient visibles entre deux balayages. Ces écrans ont une gamme dynamique maximale de 12 dB et le rapport signal sur bruit de l’écho optimal doit donc être de 4 pour 1.
Amplificateur de courant de déflexion
La déflexion, ou déviation, dans un tube cathodique à contrôle électromagnétique est proportionnelle à l’intensité du champ magnétique créé. Ce dernier dépend du courant envoyé vers les bobines d’induction donc le circuit de balayage doit faire varier le courant, et non la tension, dans les bobines. C’est un courant trapézoïdal, dit en dents-de-scie, dont la pente est linéaire qui doit être fournit pour dévier le faisceau de façon continue dans ce cas, comme dans la figure 5.
Figure 5 : Variation trapézoïdale en dents-de-scie du courant.
Bobines de déflexion
Le PPI est une représentation polaire et pour afficher les données, il faut pouvoir pointer les données en portée et en azimut. Le moyen le plus simple de montrer un balayage azimutal est d’utiliser des bobines d’inductions rotatives dans le tube cathode. Celles-ci bougent en synchronisation avec la rotation de l’antenne (ex. vieil affichage du radar russe radar P–12). Cette méthode a cependant l’inconvénient de ne pas être précise et d’être soumise aux aléas des problèmes du mécanisme de rotation dans le tube.
Les affichages PPI plus modernes utilisent des bobines fixes, comme dans la figure 2, dont le champ magnétique est contrôlé électroniquement afin de pouvoir faire une rotation complète sans pièce mobile (ex. Affichage PPI de l’ASR–910). Comme le champ magnétique dévie la trajectoire des électrons à angle droit de sa direction, les bobines sont montées en deux groupes orthogonaux:
- Le groupe N-S contrôle la déflexion;
- Le groupe E-O contrôle la déflexion horizontale.
Bloc d’alimentation
Le bloc fournit la tension nécessaire au fonctionnement de l’appareil. Il contient également des coupe-circuits de protection et des moniteurs de fonctions.
N.B. Bien que non présentés dans le diagramme, plusieurs affichages PPI ont des fonctions secondaires
qui aident à déterminer la distance et l’azimut des cibles. Ceux-ci sont synchronisés avec le circuit-porte.