Noise Radar Technology
filter
filter
filter
filter
filter
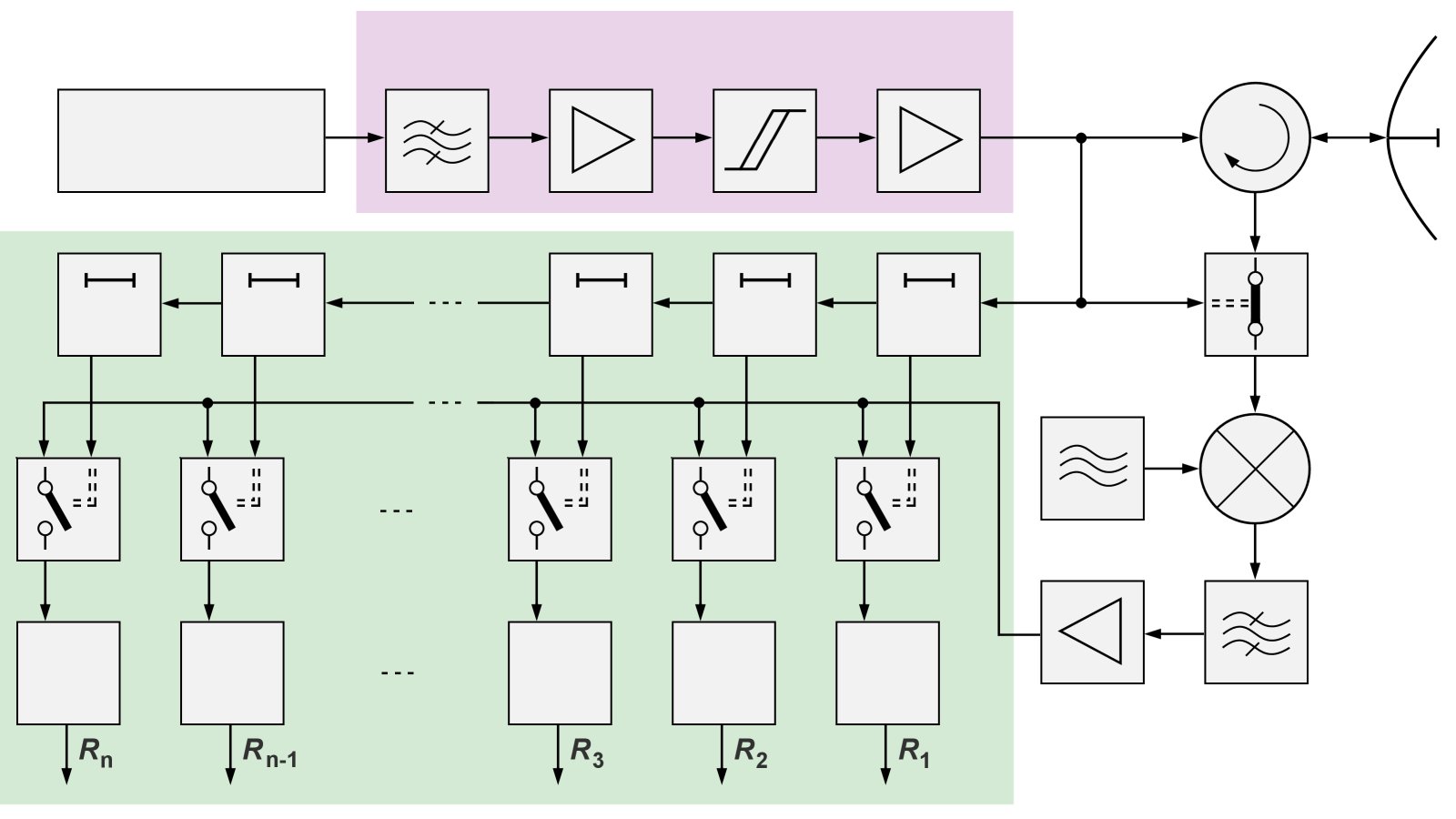
Figure 1: Block diagram of a coherent noise radar
filter
filter
filter
filter
filter
Figure 1: Block diagram of a coherent noise radar
Noise Radar Technology
Noise Radar Technology is radar technology that uses noise/chaotic/random waveform as a transmitting signal. The echo detection is based on optimal reception and correlation between the transmitted signal and the received noise waveform radar returns. Mostly, the random signal is transmitted directly from a noise generating high-frequency source. But there is also a technical realization of transmitting a continuous sine wave, which is phase or frequency modulated by random noise. This technology gives lower range sidelobes, and higher transmitted mean power when peak-limited transmitters are applied. The dynamic requirements and the bandwidth of the modulating signal can be reduced as well.
Significant improvements in military radar systems can be realized in RF application areas by taking advantage of emergent Noise Radar Technology for advanced military radar design (Stealth Radar). It creates an excellent basis for significant enhancement in the technical performance of military radar with the best Low Probability of Interception (LPI) and electromagnetic compatibility properties which are required for a covert operation in a hostile environment. Implementation of noise radar technology requires the advanced design of key components, such as:
- efficient noise waveform transmitters,
- digital correlation receivers,
- wideband antennae, etc.
Distance measuring systems using random noise as the modulating function is accomplished by correlating the modulation on the transmitted and received signals. The spectrum of the modulating function determines the way in which this correlation, and hence the system output, depends on the distance to a reflecting target. Practically each possible target distance must have its own output jack in a tapped delay line. Physical realizability of filters limits the output-to-distance behavior of linear, noise-modulated systems. Theoretically, either amplitude or frequency modulation can be used, but frequency modulation has distinct advantages in overcoming incidental spurious signals generated within the system. The resulting system is similar to existing altimeters but is free of the ambiguities inherent in periodically modulated systems, avoids the “fixed error,” and is capable of measuring distances down to a few feet. This makes it particularly suited for use as an altimeter in blind landing systems.